<?xml version="1.0" encoding="UTF-8"?>
<!DOCTYPE X3D PUBLIC "ISO//Web3D//DTD X3D 3.3//EN" "https://www.web3d.org/specifications/x3d-3.3.dtd">
<X3D profile='Immersive' version='3.3'
xmlns:xsd='http://www.w3.org/2001/XMLSchema-instance'
xsd:noNamespaceSchemaLocation
='
https://www.web3d.org/specifications/x3d-3.3.xsd
'>
<head>
<component level='1' name='HAnim'/>
<meta name='title' content='HAnimSpecificationLOA3Illustrated.x3d'/>
<meta name='description' content='HAnim Specification reference example providing full coverage and visibility of all specified HAnim constructs, also suitable for re-use as an authoring template. Geometry visualizations are derived from HAnimSpecificationLOA3Invisible.x3d visualization report. Resusable exemplar animations also added via heads-up display (HUD) interface to confirm proper parent-child relationships.'/>
<meta name='reference' content='
https://www.web3d.org/files/specifications/19774/V1.0/HAnim/BodyDimensionsAndLOAs.html#LOA3ExampleSourceWithDiamonds
'/>
<meta name='created' content='24 April 2013'/>
<meta name='modified' content='4 July 2020'/>
<meta name='TODO' content='Convert to X3D4 HAnim2'/>
<meta name='creator' content='Matthew T. Beitler, Joe D. Williams, Don Brutzman'/>
<meta name='Image' content='HAnimSpecificationLOA3Illustrated.png'/>
<meta name='Image' content='HAnimSpecificationLOA3IllustratedLeftSide.png'/>
<meta name='reference' content='HAnimSpecificationLOA3Invisible.x3d'/>
<meta name='reference' content='HAnimSpecificationLOA3Motion.x3d'/>
<meta name='reference' content='HAnimSpecificationExampleChangeLog.txt'/>
<meta name='Image' content='images/BonesAllSkeletonFrontViewLOA1.png'/>
<meta name='Image' content='images/BonesAllSkeletonFrontViewLOA2.png'/>
<meta name='Image' content='images/BonesAllSkeletonFrontViewLOA3.png'/>
<meta name='TODO' content='move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations'/>
<meta name=' warning ' content=' BS Contact and H3DViewer have polygon-culling problems at close range (possibly related to avatarSize), other players look OK '/>
<meta name='TODO' content='insert MetadataInteger nodes indicating LOA for each Joint and Segment'/>
<meta name='reference' content='Norman Badler et al., ANTHROPOMETRY FOR COMPUTER GRAPHICS HUMAN FIGURES, University of Pennsylvania, 1989.'/>
<meta name='reference' content='
http://www.cis.upenn.edu/~badler/anthro/89-71.ps
'/>
<meta name='reference' content='tables/AnthropometryForComputerGraphicsHumanFigures89-71.pdf'/>
<meta name='translator' content='Don Brutzman and Joe Williams'/>
<meta name='generator' content='BS Contact Geo 8.001,
http://www.bitmanagement.de/en/products/interactive-3d-clients/bs-contact-geo'/>
<meta name='reference' content='originals/LOA3ExampleSourceWithDiamondsOriginal.wrl'/>
<meta name='reference' content='originals/LOA3ExampleSourceWithDiamondsOriginal.x3d'/>
<meta name='reference' content='originals/LOA3ExampleSourceWithDiamondsOriginalBsContactExport.x3d'/>
<meta name='reference' content='
HAnim Specification Table 4.4 - Face Joint object names, https://www.web3d.org/files/specifications/19774/V1.0/HAnim/concepts.html#FaceJointObjectNames
'/>
<meta name='generator' content='X3D-Edit 3.3,
https://savage.nps.edu/X3D-Edit'/>
<meta name='identifier' content='
https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Specifications/HAnimSpecificationLOA3Illustrated.x3d
'/>
<meta name='license' content='
../license.html'/>
</head>
<!--
Visualization report for HAnimHumanoid model:
humanoid HAnimHumanoid Report
Index for DEF nodes
:
DiamondIFS,
hanim_back_view,
hanim_back_viewpoint,
hanim_c1,
hanim_c2,
hanim_c3,
hanim_c4,
hanim_c5,
hanim_c6,
hanim_c7,
hanim_cervicale_pt,
hanim_chest_front_close_view,
hanim_chest_front_close_viewpoint,
hanim_crotch_pt,
hanim_eye_level_view,
hanim_eye_level_viewpoint,
hanim_feet_front_close_view,
hanim_feet_front_close_viewpoint,
hanim_front_close_view,
hanim_front_close_viewpoint,
hanim_front_view,
hanim_front_viewpoint,
hanim_head_front_close_view,
hanim_head_front_close_viewpoint,
hanim_humanoid,
hanim_humanoid_root,
hanim_jaw,
hanim_knees_front_close_view,
hanim_knees_front_close_viewpoint,
hanim_l_acromioclavicular,
hanim_l_acromion_pt,
hanim_l_ankle,
hanim_l_asis_pt,
hanim_l_axilla_ant_pt,
hanim_l_axilla_post_pt,
hanim_l_calcaneous_post_pt,
hanim_l_calf,
hanim_l_clavicale_pt,
hanim_l_clavicle,
hanim_l_dactylion_pt,
hanim_l_digit2_pt,
hanim_l_elbow,
hanim_l_eyeball,
hanim_l_eyeball_joint,
hanim_l_eyeball_site_view,
hanim_l_eyeball_site_viewpoint,
hanim_l_eyebrow,
hanim_l_eyebrow_joint,
hanim_l_eyelid,
hanim_l_eyelid_joint,
hanim_l_femoral_lateral_epicn_pt,
hanim_l_femoral_medial_epicn_pt,
hanim_l_forearm,
hanim_l_forefoot,
hanim_l_forefoot_tip,
hanim_l_gonion_pt,
hanim_l_hand,
hanim_l_hand_front_view,
hanim_l_hand_front_viewpoint,
hanim_l_hindfoot,
hanim_l_hip,
hanim_l_humeral_lateral_epicn_pt,
hanim_l_humeral_medial_epicn_pt,
hanim_l_iliocristale_pt,
hanim_l_inclined_view,
hanim_l_inclined_viewpoint,
hanim_l_index_distal,
hanim_l_index_distal_tip,
hanim_l_index_metacarpal,
hanim_l_index_middle,
hanim_l_index_proximal,
hanim_l_index0,
hanim_l_index1,
hanim_l_index2,
hanim_l_index3,
hanim_l_infraorbitale_pt,
hanim_l_knee,
hanim_l_knee_crease_pt,
hanim_l_lateral_malleolus_pt,
hanim_l_medial_malleolus_pt,
hanim_l_metacarpal_pha2_pt,
hanim_l_metacarpal_pha5_pt,
hanim_l_metatarsal,
hanim_l_metatarsal_pha1_pt,
hanim_l_metatarsal_pha5_pt,
hanim_l_middistal,
hanim_l_middle_distal,
hanim_l_middle_distal_tip,
hanim_l_middle_metacarpal,
hanim_l_middle_middle,
hanim_l_middle_proximal,
hanim_l_middle0,
hanim_l_middle1,
hanim_l_middle2,
hanim_l_middle3,
hanim_l_midproximal,
hanim_l_midtarsal,
hanim_l_neck_base_pt,
hanim_l_olecranon_pt,
hanim_l_pinky_distal,
hanim_l_pinky_distal_tip,
hanim_l_pinky_metacarpal,
hanim_l_pinky_middle,
hanim_l_pinky_proximal,
hanim_l_pinky0,
hanim_l_pinky1,
hanim_l_pinky2,
hanim_l_pinky3,
hanim_l_psis_pt,
hanim_l_radial_styloid_pt,
hanim_l_radiale_pt,
hanim_l_rib10_pt,
hanim_l_ring_distal,
hanim_l_ring_distal_tip,
hanim_l_ring_metacarpal,
hanim_l_ring_middle,
hanim_l_ring_proximal,
hanim_l_ring0,
hanim_l_ring1,
hanim_l_ring2,
hanim_l_ring3,
hanim_l_scapula,
hanim_l_shoulder,
hanim_l_side_view,
hanim_l_side_viewpoint,
hanim_l_sphyrion_pt,
hanim_l_sternoclavicular,
hanim_l_subtalar,
hanim_l_thelion_pt,
hanim_l_thigh,
hanim_l_thumb_distal,
hanim_l_thumb_distal_tip,
hanim_l_thumb_metacarpal,
hanim_l_thumb_proximal,
hanim_l_thumb1,
hanim_l_thumb2,
hanim_l_thumb3,
hanim_l_tragion_pt,
hanim_l_trochanterion_pt,
hanim_l_ulnar_styloid_pt,
hanim_l_upperarm,
hanim_l_wrist,
hanim_l1,
hanim_l2,
hanim_l3,
hanim_l4,
hanim_l5,
hanim_navel_pt,
hanim_nuchale_pt,
hanim_pelvis,
hanim_pelvis_front_close_view,
hanim_pelvis_front_close_viewpoint,
hanim_r_acromioclavicular,
hanim_r_acromion_pt,
hanim_r_ankle,
hanim_r_asis_pt,
hanim_r_axilla_ant_pt,
hanim_r_axilla_post_pt,
hanim_r_calcaneous_post_pt,
hanim_r_calf,
hanim_r_clavicale_pt,
hanim_r_clavicle,
hanim_r_dactylion_pt,
hanim_r_digit2_pt,
hanim_r_elbow,
hanim_r_eyeball,
hanim_r_eyeball_joint,
hanim_r_eyeball_site_view,
hanim_r_eyeball_site_viewpoint,
hanim_r_eyebrow,
hanim_r_eyebrow_joint,
hanim_r_eyelid,
hanim_r_eyelid_joint,
hanim_r_femoral_lateral_epicn_pt,
hanim_r_femoral_medial_epicn_pt,
hanim_r_forearm,
hanim_r_forefoot,
hanim_r_forefoot_tip,
hanim_r_gonion_pt,
hanim_r_hand,
hanim_r_hand_front_view,
hanim_r_hand_front_viewpoint,
hanim_r_hindfoot,
hanim_r_hip,
hanim_r_humeral_lateral_epicn_pt,
hanim_r_humeral_medial_epicn_pt,
hanim_r_iliocristale_pt,
hanim_r_inclined_view,
hanim_r_inclined_viewpoint,
hanim_r_index_distal,
hanim_r_index_distal_tip,
hanim_r_index_metacarpal,
hanim_r_index_middle,
hanim_r_index_proximal,
hanim_r_index0,
hanim_r_index1,
hanim_r_index2,
hanim_r_index3,
hanim_r_infraorbitale_pt,
hanim_r_knee,
hanim_r_knee_crease_pt,
hanim_r_lateral_malleolus_pt,
hanim_r_medial_malleolus_pt,
hanim_r_metacarpal_pha2_pt,
hanim_r_metacarpal_pha5_pt,
hanim_r_metatarsal,
hanim_r_metatarsal_pha1_pt,
hanim_r_metatarsal_pha5_pt,
hanim_r_middistal,
hanim_r_middle_distal,
hanim_r_middle_distal_tip,
hanim_r_middle_metacarpal,
hanim_r_middle_middle,
hanim_r_middle_proximal,
hanim_r_middle0,
hanim_r_middle1,
hanim_r_middle2,
hanim_r_middle3,
hanim_r_midproximal,
hanim_r_midtarsal,
hanim_r_neck_base_pt,
hanim_r_olecranon_pt,
hanim_r_pinky_distal,
hanim_r_pinky_distal_tip,
hanim_r_pinky_metacarpal,
hanim_r_pinky_middle,
hanim_r_pinky_proximal,
hanim_r_pinky0,
hanim_r_pinky1,
hanim_r_pinky2,
hanim_r_pinky3,
hanim_r_psis_pt,
hanim_r_radial_styloid_pt,
hanim_r_radiale_pt,
hanim_r_rib10_pt,
hanim_r_ring_distal,
hanim_r_ring_distal_tip,
hanim_r_ring_metacarpal,
hanim_r_ring_middle,
hanim_r_ring_proximal,
hanim_r_ring0,
hanim_r_ring1,
hanim_r_ring2,
hanim_r_ring3,
hanim_r_scapula,
hanim_r_shoulder,
hanim_r_sphyrion_pt,
hanim_r_sternoclavicular,
hanim_r_subtalar,
hanim_r_thelion_pt,
hanim_r_thigh,
hanim_r_thumb_distal,
hanim_r_thumb_distal_tip,
hanim_r_thumb_metacarpal,
hanim_r_thumb_proximal,
hanim_r_thumb1,
hanim_r_thumb2,
hanim_r_thumb3,
hanim_r_tragion_pt,
hanim_r_trochanterion_pt,
hanim_r_ulnar_styloid_pt,
hanim_r_upperarm,
hanim_r_wrist,
hanim_rib10_midspine_pt,
hanim_sacroiliac,
hanim_sacrum,
hanim_sellion_pt,
hanim_side_close_view,
hanim_side_close_viewpoint,
hanim_skull,
hanim_skull_tip,
hanim_skullbase,
hanim_substernale_pt,
hanim_supramenton_pt,
hanim_suprasternale_pt,
hanim_t1,
hanim_t10,
hanim_t11,
hanim_t12,
hanim_t2,
hanim_t3,
hanim_t4,
hanim_t5,
hanim_t6,
hanim_t7,
hanim_t8,
hanim_t9,
hanim_temporomandibular,
hanim_temporomandibular_l_site_pt,
hanim_temporomandibular_r_site_pt,
hanim_Top_view,
hanim_Top_viewpoint,
hanim_vc1,
hanim_vc2,
hanim_vc3,
hanim_vc4,
hanim_vc5,
hanim_vc6,
hanim_vc7,
hanim_vl1,
hanim_vl2,
hanim_vl3,
hanim_vl4,
hanim_vl5,
hanim_vt1,
hanim_vt10,
hanim_vt11,
hanim_vt12,
hanim_vt2,
hanim_vt3,
hanim_vt4,
hanim_vt5,
hanim_vt6,
hanim_vt7,
hanim_vt8,
hanim_vt9,
hanim_waist_preferred_post_pt,
HAnimJointAppearance,
HAnimJointShape,
HAnimSegmentLineColorRGBA,
HAnimSiteLineColorRGBA,
HAnimSiteShape,
HAnimSiteViewpointLineColorRGBA,
HAnimSiteViewpointShape,
Original_WorldInfo,
SiteViewpointDiamondIFS
Index for Viewpoint images
:
Viewpoint_1,
Viewpoint_2,
Viewpoint_3,
Viewpoint_4,
Viewpoint_5,
Viewpoint_6,
Viewpoint_7,
Viewpoint_8,
Viewpoint_9,
hanim_back_viewpoint,
hanim_chest_front_close_viewpoint,
hanim_eye_level_viewpoint,
hanim_feet_front_close_viewpoint,
hanim_front_close_viewpoint,
hanim_front_viewpoint,
hanim_head_front_close_viewpoint,
hanim_knees_front_close_viewpoint,
hanim_l_eyeball_site_viewpoint,
hanim_l_hand_front_viewpoint,
hanim_l_inclined_viewpoint,
hanim_l_side_viewpoint,
hanim_pelvis_front_close_viewpoint,
hanim_r_eyeball_site_viewpoint,
hanim_r_hand_front_viewpoint,
hanim_r_inclined_viewpoint,
hanim_side_close_viewpoint,
hanim_Top_viewpoint
-->
<Scene>
<Background skyColor='0.3 0.3 0.3' transparency='0'/>
<NavigationInfo/>
<Group DEF='Original_WorldInfo' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<WorldInfo info='
"
HANIM 200x Default Joint Centers, Level-Of-Articulation 3 HANIM 200x (VRML97) Author name: eMpTy (a.k.a. Matthew T. Beitler) HANIM 200x (VRML97) Author email: beitler@cis.upenn.edu or beitler@acm.org HANIM 200x (VRML97) Author homepage: http://www.cis.upenn.edu/~beitler
HANIM 200x (VRML97) Compliance Date: August 12, 2003 HANIM 200x Compliance Information: http://HAnim.org/Specifications/HAnim200x
Construction Info (joint centers): The joint centers of this figure are based on the work of Norman Badler, director of the Center for Human Modeling and Simulation at the University of Pennsylvania. The original document which these joint centers are based on can be found at: http://www.cis.upenn.edu/~badler/anthro/89-71.ps
"
' title='HANIM 200x Default Joint Centers, LOA3'/>
</Group>
<!-- TODO move viewpoints to be internal to HAnimHumanoid -->
<!-- Viewpoint centerOfRotation="0 0.9149 0.0016" matches initial at-rest locaton of the sacroliac. Note that these viewpoints are external to the HAnimHumanoid and do not move with the human. -->
<Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Front' position='0 0.4 4'/>
<Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Front Close' position='0 0.8 2'/>
<Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Front Closer' position='0 1.2 1'/>
<Viewpoint centerOfRotation='0 1.5 0.0016' description='Humanoid LOA 3 Front Face' position='0 1.63 1'/>
<Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Right Side' orientation='0 1 0 1.5708' position='2.6 0.8 0'/>
<Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Right Side Close' orientation='0 1 0 1.2' position='1 0.8 0.5'/>
<Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Left Side Close' orientation='0 1 0 -1.2' position='-1 0.8 0.5'/>
<Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Left Side' orientation='0 1 0 -1.5708' position='-2.6 0.8 0'/>
<Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Top' orientation='1 0 0 -1.5708' position='0 3.5 0'/>
<HAnimHumanoid DEF='hanim_humanoid' info='"authorName=Matthew T. Beitler Joe D. Williams Don Brutzman" "authorEmail=HAnim@web3D.org" "copyright=none" "creationDate=12 May 1999" "usageRestrictions=none" "humanoidVersion=2.0" "height=1.7504"' name='humanoid' version='1.0'>
<!-- Only one root HAnimJoint is expected -->
<HAnimJoint DEF='hanim_humanoid_root' center='0 0.824 0.0277' containerField='skeleton' name='humanoid_root' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_sacrum' name='sacrum'>
<!-- <HAnimJoint name='humanoid_root'/> visualization sphere is placed within <HAnimSegment name='sacrum'/> -->
<TouchSensor description='HAnimJoint HumanoidRoot, HAnimSegment sacrum'/>
<Transform translation='0 0.824 0.0277' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<Shape DEF='HAnimJointShape' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<Sphere radius='0.006'/>
<Appearance DEF='HAnimJointAppearance'>
<Material diffuseColor='1 0.5 0' transparency='0.5'/>
</Appearance>
</Shape>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='humanoid_root'/> to <HAnimJoint name='sacroiliac'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
<Coordinate point='0 0.824 0.0277 0 0.9149 0.0016'/>
<ColorRGBA DEF='HAnimSegmentLineColorRGBA' color='1 1 0 1 1 1 0 0.1'/>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='humanoid_root'/> to <HAnimJoint name='vl5'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_sacroiliac' center='0 0.9149 0.0016' name='sacroiliac' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_pelvis' name='pelvis'>
<!-- <HAnimJoint name='sacroiliac'/> visualization sphere is placed within <HAnimSegment name='pelvis'/> -->
<TouchSensor description='HAnimJoint sacroiliac, HAnimSegment pelvis'/>
<Transform translation='0 0.9149 0.0016' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='sacroiliac'/> to <HAnimJoint name='l_hip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='sacroiliac'/> to <HAnimJoint name='r_hip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_iliocristale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
<Coordinate point='0 0.9149 0.0016 -0.1525 1.0628 0.0035'/>
<ColorRGBA DEF='HAnimSiteLineColorRGBA' color='1 0 0 1 1 0 0 0.1'/>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_trochanterion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_iliocristale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_trochanterion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_asis'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_asis'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_psis'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_psis'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='crotch'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_iliocristale_pt' name='r_iliocristale_pt' translation='-0.1525 1.0628 0.0035' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_iliocristale'/>
<Shape DEF='HAnimSiteShape' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<IndexedFaceSet DEF='DiamondIFS' creaseAngle='0.5' solid='false' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'>
<Coordinate point='0 0.008 0 -0.008 0 0 0 0 0.008 0.008 0 0 0 0 -0.008 0 -0.008 0'/>
</IndexedFaceSet>
<Appearance>
<Material diffuseColor='1 0 0'/>
</Appearance>
</Shape>
</HAnimSite>
<HAnimSite DEF='hanim_r_trochanterion_pt' name='r_trochanterion_pt' translation='-0.1689 0.8419 0.0352' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_trochanterion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_iliocristale_pt' name='l_iliocristale_pt' translation='0.1612 1.0537 0.0008' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_iliocristale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_trochanterion_pt' name='l_trochanterion_pt' translation='0.1677 0.8336 0.0303' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_trochanterion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_asis_pt' name='r_asis_pt' translation='-0.0887 1.0021 0.1112' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_asis'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_asis_pt' name='l_asis_pt' translation='0.0925 0.9983 0.1052' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_asis'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_psis_pt' name='r_psis_pt' translation='-0.0716 1.019 -0.1138' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_psis'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_psis_pt' name='l_psis_pt' translation='0.0774 1.019 -0.1151' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_psis'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_crotch_pt' name='crotch_pt' translation='0.0034 0.8266 0.0257' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite crotch'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_hip' center='0.0961 0.9124 -0.0001' name='l_hip' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_thigh' name='l_thigh'>
<!-- <HAnimJoint name='l_hip'/> visualization sphere is placed within <HAnimSegment name='l_thigh'/> -->
<TouchSensor description='HAnimJoint l_hip, HAnimSegment l_thigh'/>
<Transform translation='0.0961 0.9124 -0.0001' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_hip'/> to <HAnimJoint name='l_knee'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_knee_crease'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_femoral_lateral_epicn'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_femoral_medial_epicn'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_knee_crease_pt' name='l_knee_crease_pt' translation='0.0993 0.4881 -0.0309' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_knee_crease'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_femoral_lateral_epicn_pt' name='l_femoral_lateral_epicn_pt' translation='0.1598 0.4967 0.0297' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_femoral_lateral_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_femoral_medial_epicn_pt' name='l_femoral_medial_epicn_pt' translation='0.0398 0.4946 0.0303' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_femoral_medial_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_knee' center='0.104 0.4867 0.0308' name='l_knee' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_calf' name='l_calf'>
<!-- <HAnimJoint name='l_knee'/> visualization sphere is placed within <HAnimSegment name='l_calf'/> -->
<TouchSensor description='HAnimJoint l_knee, HAnimSegment l_calf'/>
<Transform translation='0.104 0.4867 0.0308' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_knee'/> to <HAnimJoint name='l_ankle'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_ankle' center='0.1101 0.0656 -0.0736' name='l_ankle' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_hindfoot' name='l_hindfoot'>
<!-- <HAnimJoint name='l_ankle'/> visualization sphere is placed within <HAnimSegment name='l_hindfoot'/> -->
<TouchSensor description='HAnimJoint l_ankle, HAnimSegment l_hindfoot'/>
<Transform translation='0.1101 0.0656 -0.0736' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ankle'/> to <HAnimJoint name='l_subtalar'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_lateral_malleolus'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_medial_malleolus'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_sphyrion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_calcaneous_post'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_lateral_malleolus_pt' name='l_lateral_malleolus_pt' translation='0.1308 0.0597 -0.1032' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_lateral_malleolus'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_medial_malleolus_pt' name='l_medial_malleolus_pt' translation='0.089 0.0716 -0.0881' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_medial_malleolus'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_sphyrion_pt' name='l_sphyrion_pt' translation='0.089 0.0575 -0.0943' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_sphyrion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_calcaneous_post_pt' name='l_calcaneous_post_pt' translation='0.0974 0.0259 -0.1171' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_calcaneous_post'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_subtalar' center='0.1086 0.0001 -0.0368' name='l_subtalar' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_midproximal' name='l_midproximal'>
<!-- <HAnimJoint name='l_subtalar'/> visualization sphere is placed within <HAnimSegment name='l_midproximal'/> -->
<TouchSensor description='HAnimJoint l_subtalar, HAnimSegment l_midproximal'/>
<Transform translation='0.1086 0.0001 -0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_subtalar'/> to <HAnimJoint name='l_midtarsal'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_midtarsal' center='0.1086 0.0001 0.0368' name='l_midtarsal' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_middistal' name='l_middistal'>
<!-- <HAnimJoint name='l_midtarsal'/> visualization sphere is placed within <HAnimSegment name='l_middistal'/> -->
<TouchSensor description='HAnimJoint l_midtarsal, HAnimSegment l_middistal'/>
<Transform translation='0.1086 0.0001 0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_midtarsal'/> to <HAnimJoint name='l_metatarsal'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_midtarsal'/> to <HAnimSite name='l_metatarsal_pha1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_metatarsal_pha1_pt' name='l_metatarsal_pha1_pt' translation='0.0816 0.0232 0.0106' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_metatarsal_pha1'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_metatarsal' center='0.1086 0 0.0762' name='l_metatarsal' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_forefoot' name='l_forefoot'>
<!-- <HAnimJoint name='l_metatarsal'/> visualization sphere is placed within <HAnimSegment name='l_forefoot'/> -->
<TouchSensor description='HAnimJoint l_metatarsal, HAnimSegment l_forefoot'/>
<Transform translation='0.1086 0 0.0762' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_forefoot_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_metatarsal_pha5'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_digit2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_forefoot_tip' name='l_forefoot_tip' translation='0.1354 0.0016 0.1476' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_forefoot_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_metatarsal_pha5_pt' name='l_metatarsal_pha5_pt' translation='0.1825 0.007 0.0928' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_metatarsal_pha5'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_digit2_pt' name='l_digit2_pt' translation='0.1195 0.0079 0.1433' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_digit2'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_r_hip' center='-0.0961 0.9124 -0.0001' name='r_hip' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_thigh' name='r_thigh'>
<!-- <HAnimJoint name='r_hip'/> visualization sphere is placed within <HAnimSegment name='r_thigh'/> -->
<TouchSensor description='HAnimJoint r_hip, HAnimSegment r_thigh'/>
<Transform translation='-0.0961 0.9124 -0.0001' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_hip'/> to <HAnimJoint name='r_knee'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_knee_crease'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_femoral_lateral_epicn'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_femoral_medial_epicn'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_knee_crease_pt' name='r_knee_crease_pt' translation='-0.0825 0.4932 -0.0326' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_knee_crease'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_femoral_lateral_epicn_pt' name='r_femoral_lateral_epicn_pt' translation='-0.1421 0.4992 0.031' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_femoral_lateral_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_femoral_medial_epicn_pt' name='r_femoral_medial_epicn_pt' translation='-0.0221 0.5014 0.0289' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_femoral_medial_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_knee' center='-0.104 0.4867 0.0308' name='r_knee' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_calf' name='r_calf'>
<!-- <HAnimJoint name='r_knee'/> visualization sphere is placed within <HAnimSegment name='r_calf'/> -->
<TouchSensor description='HAnimJoint r_knee, HAnimSegment r_calf'/>
<Transform translation='-0.104 0.4867 0.0308' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_knee'/> to <HAnimJoint name='r_ankle'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_ankle' center='-0.1101 0.0656 -0.0736' name='r_ankle' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_hindfoot' name='r_hindfoot'>
<!-- <HAnimJoint name='r_ankle'/> visualization sphere is placed within <HAnimSegment name='r_hindfoot'/> -->
<TouchSensor description='HAnimJoint r_ankle, HAnimSegment r_hindfoot'/>
<Transform translation='-0.1101 0.0656 -0.0736' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ankle'/> to <HAnimJoint name='r_subtalar'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_lateral_malleolus'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_medial_malleolus'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_sphyrion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_calcaneous_post'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_lateral_malleolus_pt' name='r_lateral_malleolus_pt' translation='-0.1006 0.0658 -0.1075' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_lateral_malleolus'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_medial_malleolus_pt' name='r_medial_malleolus_pt' translation='-0.0591 0.076 -0.0928' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_medial_malleolus'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_sphyrion_pt' name='r_sphyrion_pt' translation='-0.0603 0.061 -0.1002' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_sphyrion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_calcaneous_post_pt' name='r_calcaneous_post_pt' translation='-0.0692 0.0297 -0.1221' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_calcaneous_post'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_subtalar' center='-0.1086 0.0001 -0.0368' name='r_subtalar' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_midproximal' name='r_midproximal'>
<!-- <HAnimJoint name='r_subtalar'/> visualization sphere is placed within <HAnimSegment name='r_midproximal'/> -->
<TouchSensor description='HAnimJoint r_subtalar, HAnimSegment r_midproximal'/>
<Transform translation='-0.1086 0.0001 -0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_subtalar'/> to <HAnimJoint name='r_midtarsal'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_midtarsal' center='-0.1086 0.0001 0.0368' name='r_midtarsal' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_middistal' name='r_middistal'>
<!-- <HAnimJoint name='r_midtarsal'/> visualization sphere is placed within <HAnimSegment name='r_middistal'/> -->
<TouchSensor description='HAnimJoint r_midtarsal, HAnimSegment r_middistal'/>
<Transform translation='-0.1086 0.0001 0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_midtarsal'/> to <HAnimJoint name='r_metatarsal'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_midtarsal'/> to <HAnimSite name='r_metatarsal_pha1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_metatarsal_pha1_pt' name='r_metatarsal_pha1_pt' translation='-0.0521 0.026 0.0127' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_metatarsal_pha1'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_metatarsal' center='-0.1086 0 0.0762' name='r_metatarsal' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_forefoot' name='r_forefoot'>
<!-- <HAnimJoint name='r_metatarsal'/> visualization sphere is placed within <HAnimSegment name='r_forefoot'/> -->
<TouchSensor description='HAnimJoint r_metatarsal, HAnimSegment r_forefoot'/>
<Transform translation='-0.1086 0 0.0762' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_forefoot_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_metatarsal_pha5'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_digit2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_forefoot_tip' name='r_forefoot_tip' translation='-0.1043 0.0227 0.145' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_forefoot_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_metatarsal_pha5_pt' name='r_metatarsal_pha5_pt' translation='-0.1523 0.0166 0.0895' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_metatarsal_pha5'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_digit2_pt' name='r_digit2_pt' translation='-0.0883 0.0134 0.1383' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_digit2'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_vl5' center='0.0028 1.0568 -0.0776' name='vl5' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l5' name='l5'>
<!-- <HAnimJoint name='vl5'/> visualization sphere is placed within <HAnimSegment name='l5'/> -->
<TouchSensor description='HAnimJoint vl5, HAnimSegment l5'/>
<Transform translation='0.0028 1.0568 -0.0776' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl5'/> to <HAnimJoint name='vl4'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl5'/> to <HAnimSite name='waist_preferred_post'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl5'/> to <HAnimSite name='navel'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_waist_preferred_post_pt' name='waist_preferred_post_pt' translation='0 1.0915 -0.1091' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite waist_preferred_post'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_navel_pt' name='navel_pt' translation='0.0069 1.0966 0.1017' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite navel'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_vl4' center='0.0035 1.0925 -0.0787' name='vl4' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l4' name='l4'>
<!-- <HAnimJoint name='vl4'/> visualization sphere is placed within <HAnimSegment name='l4'/> -->
<TouchSensor description='HAnimJoint vl4, HAnimSegment l4'/>
<Transform translation='0.0035 1.0925 -0.0787' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl4'/> to <HAnimJoint name='vl3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vl3' center='0.0041 1.1276 -0.0796' name='vl3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l3' name='l3'>
<!-- <HAnimJoint name='vl3'/> visualization sphere is placed within <HAnimSegment name='l3'/> -->
<TouchSensor description='HAnimJoint vl3, HAnimSegment l3'/>
<Transform translation='0.0041 1.1276 -0.0796' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl3'/> to <HAnimJoint name='vl2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vl2' center='0.0045 1.1546 -0.08' name='vl2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l2' name='l2'>
<!-- <HAnimJoint name='vl2'/> visualization sphere is placed within <HAnimSegment name='l2'/> -->
<TouchSensor description='HAnimJoint vl2, HAnimSegment l2'/>
<Transform translation='0.0045 1.1546 -0.08' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl2'/> to <HAnimJoint name='vl1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='r_rib10'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='l_rib10'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='rib10_midspine'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_rib10_pt' name='r_rib10_pt' translation='-0.0711 1.1941 0.1016' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_rib10'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_rib10_pt' name='l_rib10_pt' translation='0.0871 1.1925 0.0992' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_rib10'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_rib10_midspine_pt' name='rib10_midspine_pt' translation='0.0049 1.1908 -0.1113' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite rib10_midspine'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_vl1' center='0.0048 1.1912 -0.0805' name='vl1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l1' name='l1'>
<!-- <HAnimJoint name='vl1'/> visualization sphere is placed within <HAnimSegment name='l1'/> -->
<TouchSensor description='HAnimJoint vl1, HAnimSegment l1'/>
<Transform translation='0.0048 1.1912 -0.0805' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl1'/> to <HAnimJoint name='vt12'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt12' center='0.0051 1.2278 -0.0808' name='vt12' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t12' name='t12'>
<!-- <HAnimJoint name='vt12'/> visualization sphere is placed within <HAnimSegment name='t12'/> -->
<TouchSensor description='HAnimJoint vt12, HAnimSegment t12'/>
<Transform translation='0.0051 1.2278 -0.0808' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt12'/> to <HAnimJoint name='vt11'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt11' center='0.0053 1.2679 -0.081' name='vt11' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t11' name='t11'>
<!-- <HAnimJoint name='vt11'/> visualization sphere is placed within <HAnimSegment name='t11'/> -->
<TouchSensor description='HAnimJoint vt11, HAnimSegment t11'/>
<Transform translation='0.0053 1.2679 -0.081' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt11'/> to <HAnimJoint name='vt10'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt10' center='0.0056 1.2848 -0.0822' name='vt10' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t10' name='t10'>
<!-- <HAnimJoint name='vt10'/> visualization sphere is placed within <HAnimSegment name='t10'/> -->
<TouchSensor description='HAnimJoint vt10, HAnimSegment t10'/>
<Transform translation='0.0056 1.2848 -0.0822' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt10'/> to <HAnimJoint name='vt9'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt10'/> to <HAnimSite name='substernale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_substernale_pt' name='substernale_pt' translation='0.0085 1.2995 0.1147' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite substernale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt9' center='0.0057 1.3126 -0.0838' name='vt9' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t9' name='t9'>
<!-- <HAnimJoint name='vt9'/> visualization sphere is placed within <HAnimSegment name='t9'/> -->
<TouchSensor description='HAnimJoint vt9, HAnimSegment t9'/>
<Transform translation='0.0057 1.3126 -0.0838' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt9'/> to <HAnimJoint name='vt8'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt9'/> to <HAnimSite name='r_thelion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt9'/> to <HAnimSite name='l_thelion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_thelion_pt' name='r_thelion_pt' translation='-0.0736 1.3385 0.1217' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_thelion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_thelion_pt' name='l_thelion_pt' translation='0.0918 1.3382 0.1192' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_thelion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt8' center='0.0057 1.3382 -0.0845' name='vt8' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t8' name='t8'>
<!-- <HAnimJoint name='vt8'/> visualization sphere is placed within <HAnimSegment name='t8'/> -->
<TouchSensor description='HAnimJoint vt8, HAnimSegment t8'/>
<Transform translation='0.0057 1.3382 -0.0845' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt8'/> to <HAnimJoint name='vt7'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt7' center='0.0058 1.3625 -0.0833' name='vt7' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t7' name='t7'>
<!-- <HAnimJoint name='vt7'/> visualization sphere is placed within <HAnimSegment name='t7'/> -->
<TouchSensor description='HAnimJoint vt7, HAnimSegment t7'/>
<Transform translation='0.0058 1.3625 -0.0833' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt7'/> to <HAnimJoint name='vt6'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt6' center='0.0059 1.3866 -0.08' name='vt6' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t6' name='t6'>
<!-- <HAnimJoint name='vt6'/> visualization sphere is placed within <HAnimSegment name='t6'/> -->
<TouchSensor description='HAnimJoint vt6, HAnimSegment t6'/>
<Transform translation='0.0059 1.3866 -0.08' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt6'/> to <HAnimJoint name='vt5'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt5' center='0.006 1.4102 -0.0745' name='vt5' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t5' name='t5'>
<!-- <HAnimJoint name='vt5'/> visualization sphere is placed within <HAnimSegment name='t5'/> -->
<TouchSensor description='HAnimJoint vt5, HAnimSegment t5'/>
<Transform translation='0.006 1.4102 -0.0745' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt5'/> to <HAnimJoint name='vt4'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt4' center='0.0061 1.432 -0.0675' name='vt4' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t4' name='t4'>
<!-- <HAnimJoint name='vt4'/> visualization sphere is placed within <HAnimSegment name='t4'/> -->
<TouchSensor description='HAnimJoint vt4, HAnimSegment t4'/>
<Transform translation='0.0061 1.432 -0.0675' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt4'/> to <HAnimJoint name='vt3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt3' center='0.0062 1.4583 -0.057' name='vt3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t3' name='t3'>
<!-- <HAnimJoint name='vt3'/> visualization sphere is placed within <HAnimSegment name='t3'/> -->
<TouchSensor description='HAnimJoint vt3, HAnimSegment t3'/>
<Transform translation='0.0062 1.4583 -0.057' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt3'/> to <HAnimJoint name='vt2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt2' center='0.0063 1.4761 -0.0484' name='vt2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t2' name='t2'>
<!-- <HAnimJoint name='vt2'/> visualization sphere is placed within <HAnimSegment name='t2'/> -->
<TouchSensor description='HAnimJoint vt2, HAnimSegment t2'/>
<Transform translation='0.0063 1.4761 -0.0484' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt2'/> to <HAnimJoint name='vt1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vt1' center='0.0065 1.4951 -0.0387' name='vt1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_t1' name='t1'>
<!-- <HAnimJoint name='vt1'/> visualization sphere is placed within <HAnimSegment name='t1'/> -->
<TouchSensor description='HAnimJoint vt1, HAnimSegment t1'/>
<Transform translation='0.0065 1.4951 -0.0387' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt1'/> to <HAnimJoint name='vc7'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt1'/> to <HAnimJoint name='l_sternoclavicular'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt1'/> to <HAnimJoint name='r_sternoclavicular'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt1'/> to <HAnimSite name='suprasternale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt1'/> to <HAnimSite name='cervicale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_suprasternale_pt' name='suprasternale_pt' translation='0.0084 1.4714 0.0551' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite suprasternale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_cervicale_pt' name='cervicale_pt' translation='0.0064 1.52 -0.0815' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite cervicale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_vc7' center='0.0066 1.5132 -0.0301' name='vc7' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_c7' name='c7'>
<!-- <HAnimJoint name='vc7'/> visualization sphere is placed within <HAnimSegment name='c7'/> -->
<TouchSensor description='HAnimJoint vc7, HAnimSegment c7'/>
<Transform translation='0.0066 1.5132 -0.0301' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc7'/> to <HAnimJoint name='vc6'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vc7'/> to <HAnimSite name='r_neck_base'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vc7'/> to <HAnimSite name='l_neck_base'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_neck_base_pt' name='r_neck_base_pt' translation='-0.0419 1.5149 -0.022' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_neck_base'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_neck_base_pt' name='l_neck_base_pt' translation='0.0646 1.5141 -0.038' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_neck_base'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_vc6' center='0.0066 1.5357 -0.0143' name='vc6' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_c6' name='c6'>
<!-- <HAnimJoint name='vc6'/> visualization sphere is placed within <HAnimSegment name='c6'/> -->
<TouchSensor description='HAnimJoint vc6, HAnimSegment c6'/>
<Transform translation='0.0066 1.5357 -0.0143' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc6'/> to <HAnimJoint name='vc5'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vc5' center='0.0066 1.552 -0.0082' name='vc5' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_c5' name='c5'>
<!-- <HAnimJoint name='vc5'/> visualization sphere is placed within <HAnimSegment name='c5'/> -->
<TouchSensor description='HAnimJoint vc5, HAnimSegment c5'/>
<Transform translation='0.0066 1.552 -0.0082' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc5'/> to <HAnimJoint name='vc4'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vc4' center='0.0066 1.5662 -0.0084' name='vc4' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_c4' name='c4'>
<!-- <HAnimJoint name='vc4'/> visualization sphere is placed within <HAnimSegment name='c4'/> -->
<TouchSensor description='HAnimJoint vc4, HAnimSegment c4'/>
<Transform translation='0.0066 1.5662 -0.0084' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc4'/> to <HAnimJoint name='vc3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vc3' center='0.0066 1.58 -0.0103' name='vc3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_c3' name='c3'>
<!-- <HAnimJoint name='vc3'/> visualization sphere is placed within <HAnimSegment name='c3'/> -->
<TouchSensor description='HAnimJoint vc3, HAnimSegment c3'/>
<Transform translation='0.0066 1.58 -0.0103' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc3'/> to <HAnimJoint name='vc2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vc2' center='0.0066 1.5928 -0.0103' name='vc2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_c2' name='c2'>
<!-- <HAnimJoint name='vc2'/> visualization sphere is placed within <HAnimSegment name='c2'/> -->
<TouchSensor description='HAnimJoint vc2, HAnimSegment c2'/>
<Transform translation='0.0066 1.5928 -0.0103' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc2'/> to <HAnimJoint name='vc1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_vc1' center='0.0066 1.6144 -0.0034' name='vc1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_c1' name='c1'>
<!-- <HAnimJoint name='vc1'/> visualization sphere is placed within <HAnimSegment name='c1'/> -->
<TouchSensor description='HAnimJoint vc1, HAnimSegment c1'/>
<Transform translation='0.0066 1.6144 -0.0034' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc1'/> to <HAnimJoint name='skullbase'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_skullbase' center='0.0044 1.6209 0.0236' name='skullbase' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_skull' name='skull'>
<!-- <HAnimJoint name='skullbase'/> visualization sphere is placed within <HAnimSegment name='skull'/> -->
<TouchSensor description='HAnimJoint skullbase, HAnimSegment skull'/>
<Transform translation='0.0044 1.6209 0.0236' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='l_eyeball_joint'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='l_eyelid_joint'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='l_eyebrow_joint'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='r_eyeball_joint'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='r_eyelid_joint'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='r_eyebrow_joint'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='temporomandibular'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='skull_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='sellion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_infraorbitale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_infraorbitale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='supramenton'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_tragion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_gonion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_tragion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_gonion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='nuchale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_skull_tip' name='skull_tip' translation='0.005 1.7504 0.0055' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- TODO move skull_tip x to zero, check others for symmetry -->
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite skull_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_sellion_pt' name='sellion_pt' translation='0.0058 1.6316 0.0852' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite sellion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_infraorbitale_pt' name='r_infraorbitale_pt' translation='-0.0237 1.6171 0.0752' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_infraorbitale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_infraorbitale_pt' name='l_infraorbitale_pt' translation='0.0341 1.6171 0.0752' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_infraorbitale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_supramenton_pt' name='supramenton_pt' translation='0.0061 1.541 0.0805' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite supramenton'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_tragion_pt' name='r_tragion_pt' translation='-0.0646 1.6347 0.0302' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_tragion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_gonion_pt' name='r_gonion_pt' translation='-0.052 1.5529 0.0347' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_gonion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_tragion_pt' name='l_tragion_pt' translation='0.0739 1.6348 0.0282' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_tragion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_gonion_pt' name='l_gonion_pt' translation='0.0631 1.553 0.033' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_gonion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_nuchale_pt' name='nuchale_pt' translation='0.0039 1.5972 -0.0796' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite nuchale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_eyeball_joint' center='0.0336 1.6332 0.0502' name='l_eyeball_joint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_eyeball' name='l_eyeball'>
<!-- <HAnimJoint name='l_eyeball_joint'/> visualization sphere is placed within <HAnimSegment name='l_eyeball'/> -->
<TouchSensor description='HAnimJoint l_eyeball_joint, HAnimSegment l_eyeball'/>
<Transform translation='0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='l_eyeball_joint'/> to <HAnimSite name='l_eyeball_site_view'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
<Coordinate point='0.0336 1.6332 0.0502 0.034 1.64 0.05'/>
<ColorRGBA DEF='HAnimSiteViewpointLineColorRGBA' color='0 0 1 1 0 0 1 0.1'/>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_eyeball_site_view' name='l_eyeball_site_view' translation='0.034 1.64 0.05' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_eyeball_site_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_l_eyeball_site_viewpoint' description='l_eyeball_site_viewpoint looking forward' orientation='0 1 0 3.141593' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_l_eyeball_site_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_l_eyeball_site_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<WorldInfo info='"hide diamond when close"'/>
<Shape DEF='HAnimSiteViewpointShape' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<IndexedFaceSet DEF='SiteViewpointDiamondIFS' creaseAngle='0.5' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'>
<Coordinate point='0 0.010 0 -0.010 0 0 0 0 0.010 0.010 0 0 0 0 -0.010 0 -0.010 0'/>
</IndexedFaceSet>
<Appearance>
<Material diffuseColor='0 0 1' transparency='0.6'/>
</Appearance>
</Shape>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
<HAnimJoint DEF='hanim_l_eyelid_joint' center='0.0336 1.6332 0.0502' name='l_eyelid_joint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_eyelid' name='l_eyelid'>
<!-- <HAnimJoint name='l_eyelid_joint'/> visualization sphere is placed within <HAnimSegment name='l_eyelid'/> -->
<TouchSensor description='HAnimJoint l_eyelid_joint, HAnimSegment l_eyelid'/>
<Transform translation='0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
</HAnimSegment>
</HAnimJoint>
<HAnimJoint DEF='hanim_l_eyebrow_joint' center='0.0336 1.635 0.0506' name='l_eyebrow_joint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_eyebrow' name='l_eyebrow'>
<!-- <HAnimJoint name='l_eyebrow_joint'/> visualization sphere is placed within <HAnimSegment name='l_eyebrow'/> -->
<TouchSensor description='HAnimJoint l_eyebrow_joint, HAnimSegment l_eyebrow'/>
<Transform translation='0.0336 1.635 0.0506' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
</HAnimSegment>
</HAnimJoint>
<HAnimJoint DEF='hanim_r_eyeball_joint' center='-0.0336 1.6332 0.0502' name='r_eyeball_joint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_eyeball' name='r_eyeball'>
<!-- <HAnimJoint name='r_eyeball_joint'/> visualization sphere is placed within <HAnimSegment name='r_eyeball'/> -->
<TouchSensor description='HAnimJoint r_eyeball_joint, HAnimSegment r_eyeball'/>
<Transform translation='-0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='r_eyeball_joint'/> to <HAnimSite name='r_eyeball_site_view'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_eyeball_site_view' name='r_eyeball_site_view' translation='-0.034 1.64 0.05' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_eyeball_site_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_r_eyeball_site_viewpoint' description='r_eyeball_site_viewpoint looking forward' orientation='0 1 0 3.141593' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_r_eyeball_site_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_r_eyeball_site_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
<HAnimJoint DEF='hanim_r_eyelid_joint' center='-0.0336 1.6332 0.0502' name='r_eyelid_joint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_eyelid' name='r_eyelid'>
<!-- <HAnimJoint name='r_eyelid_joint'/> visualization sphere is placed within <HAnimSegment name='r_eyelid'/> -->
<TouchSensor description='HAnimJoint r_eyelid_joint, HAnimSegment r_eyelid'/>
<Transform translation='-0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
</HAnimSegment>
</HAnimJoint>
<HAnimJoint DEF='hanim_r_eyebrow_joint' center='-0.0336 1.635 0.0506' name='r_eyebrow_joint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_eyebrow' name='r_eyebrow'>
<!-- <HAnimJoint name='r_eyebrow_joint'/> visualization sphere is placed within <HAnimSegment name='r_eyebrow'/> -->
<TouchSensor description='HAnimJoint r_eyebrow_joint, HAnimSegment r_eyebrow'/>
<Transform translation='-0.0336 1.635 0.0506' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
</HAnimSegment>
</HAnimJoint>
<HAnimJoint DEF='hanim_temporomandibular' center='0.0 1.63 0.015' name='temporomandibular' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- Single joint, single segment for jaw, two sites for left/right TMJs https://en.wikipedia.org/wiki/Temporomandibular_joint -->
<HAnimSegment DEF='hanim_jaw' name='jaw'>
<!-- <HAnimJoint name='temporomandibular'/> visualization sphere is placed within <HAnimSegment name='jaw'/> -->
<TouchSensor description='HAnimJoint temporomandibular, HAnimSegment jaw'/>
<Transform translation='0.0 1.63 0.015' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='temporomandibular'/> to <HAnimSite name='temporomandibular_l_site'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='temporomandibular'/> to <HAnimSite name='temporomandibular_r_site'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_temporomandibular_l_site_pt' name='temporomandibular_l_site_pt' translation='0.045 1.63 0.0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite temporomandibular_l_site'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_temporomandibular_r_site_pt' name='temporomandibular_r_site_pt' translation='-0.045 1.63 0.0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite temporomandibular_r_site'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_l_sternoclavicular' center='0.082 1.4488 -0.0353' name='l_sternoclavicular' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_clavicle' name='l_clavicle'>
<!-- <HAnimJoint name='l_sternoclavicular'/> visualization sphere is placed within <HAnimSegment name='l_clavicle'/> -->
<TouchSensor description='HAnimJoint l_sternoclavicular, HAnimSegment l_clavicle'/>
<Transform translation='0.082 1.4488 -0.0353' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_sternoclavicular'/> to <HAnimJoint name='l_acromioclavicular'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_clavicale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_acromion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_axilla_ant'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_axilla_post'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_clavicale_pt' name='l_clavicale_pt' translation='0.0271 1.4943 0.0394' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_clavicale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_acromion_pt' name='l_acromion_pt' translation='0.2032 1.476 -0.049' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_acromion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_axilla_ant_pt' name='l_axilla_ant_pt' translation='0.1777 1.4065 -0.0075' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_axilla_ant'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_axilla_post_pt' name='l_axilla_post_pt' translation='0.1706 1.4072 -0.0875' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_axilla_post'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_acromioclavicular' center='0.0962 1.4269 -0.0424' name='l_acromioclavicular' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_scapula' name='l_scapula'>
<!-- <HAnimJoint name='l_acromioclavicular'/> visualization sphere is placed within <HAnimSegment name='l_scapula'/> -->
<TouchSensor description='HAnimJoint l_acromioclavicular, HAnimSegment l_scapula'/>
<Transform translation='0.0962 1.4269 -0.0424' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_acromioclavicular'/> to <HAnimJoint name='l_shoulder'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_shoulder' center='0.2029 1.4376 -0.0387' name='l_shoulder' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_upperarm' name='l_upperarm'>
<!-- <HAnimJoint name='l_shoulder'/> visualization sphere is placed within <HAnimSegment name='l_upperarm'/> -->
<TouchSensor description='HAnimJoint l_shoulder, HAnimSegment l_upperarm'/>
<Transform translation='0.2029 1.4376 -0.0387' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_shoulder'/> to <HAnimJoint name='l_elbow'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_shoulder'/> to <HAnimSite name='l_humeral_lateral_epicn'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_humeral_lateral_epicn_pt' name='l_humeral_lateral_epicn_pt' translation='0.228 1.1482 -0.11' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_humeral_lateral_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_elbow' center='0.2014 1.1357 -0.0682' name='l_elbow' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_forearm' name='l_forearm'>
<!-- <HAnimJoint name='l_elbow'/> visualization sphere is placed within <HAnimSegment name='l_forearm'/> -->
<TouchSensor description='HAnimJoint l_elbow, HAnimSegment l_forearm'/>
<Transform translation='0.2014 1.1357 -0.0682' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_elbow'/> to <HAnimJoint name='l_wrist'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_radial_styloid'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_olecranon'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_humeral_medial_epicn'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_radiale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_radial_styloid_pt' name='l_radial_styloid_pt' translation='0.1901 0.8645 -0.0415' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_radial_styloid'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_olecranon_pt' name='l_olecranon_pt' translation='0.1962 1.1375 -0.1123' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_olecranon'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_humeral_medial_epicn_pt' name='l_humeral_medial_epicn_pt' translation='0.1735 1.1272 -0.1113' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_humeral_medial_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_radiale_pt' name='l_radiale_pt' translation='0.2182 1.1212 -0.1167' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_radiale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_wrist' center='0.1984 0.8663 -0.0583' name='l_wrist' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_hand' name='l_hand'>
<!-- <HAnimJoint name='l_wrist'/> visualization sphere is placed within <HAnimSegment name='l_hand'/> -->
<TouchSensor description='HAnimJoint l_wrist, HAnimSegment l_hand'/>
<Transform translation='0.1984 0.8663 -0.0583' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_thumb1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_index0'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_middle0'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_ring0'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_pinky0'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_metacarpal_pha2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_ulnar_styloid'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_metacarpal_pha5'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_hand_front_view'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_metacarpal_pha2_pt' name='l_metacarpal_pha2_pt' translation='0.2009 0.8139 -0.0237' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_metacarpal_pha2'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_ulnar_styloid_pt' name='l_ulnar_styloid_pt' translation='0.2142 0.8529 -0.0648' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_ulnar_styloid'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_metacarpal_pha5_pt' name='l_metacarpal_pha5_pt' translation='0.1929 0.786 -0.1122' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_metacarpal_pha5'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_hand_front_view' name='l_hand_front_view' translation='0.3 0.75 0.45' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_hand_front_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_l_hand_front_viewpoint' centerOfRotation='0 0.7 0' description='left hand front' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_l_hand_front_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_l_hand_front_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_thumb1' center='0.1924 0.8472 -0.0534' name='l_thumb1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_thumb_metacarpal' name='l_thumb_metacarpal'>
<!-- <HAnimJoint name='l_thumb1'/> visualization sphere is placed within <HAnimSegment name='l_thumb_metacarpal'/> -->
<TouchSensor description='HAnimJoint l_thumb1, HAnimSegment l_thumb_metacarpal'/>
<Transform translation='0.1924 0.8472 -0.0534' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_thumb1'/> to <HAnimJoint name='l_thumb2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_thumb2' center='0.1951 0.8226 0.0246' name='l_thumb2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_thumb_proximal' name='l_thumb_proximal'>
<!-- <HAnimJoint name='l_thumb2'/> visualization sphere is placed within <HAnimSegment name='l_thumb_proximal'/> -->
<TouchSensor description='HAnimJoint l_thumb2, HAnimSegment l_thumb_proximal'/>
<Transform translation='0.1951 0.8226 0.0246' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_thumb2'/> to <HAnimJoint name='l_thumb3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_thumb3' center='0.1955 0.8159 0.0464' name='l_thumb3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_thumb_distal' name='l_thumb_distal'>
<!-- <HAnimJoint name='l_thumb3'/> visualization sphere is placed within <HAnimSegment name='l_thumb_distal'/> -->
<TouchSensor description='HAnimJoint l_thumb3, HAnimSegment l_thumb_distal'/>
<Transform translation='0.1955 0.8159 0.0464' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_thumb3'/> to <HAnimSite name='l_thumb_distal_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_thumb_distal_tip' name='l_thumb_distal_tip' translation='0.1982 0.8061 0.0759' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_thumb_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_l_index0' center='0.1983 0.8024 -0.028' name='l_index0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_index_metacarpal' name='l_index_metacarpal'>
<!-- <HAnimJoint name='l_index0'/> visualization sphere is placed within <HAnimSegment name='l_index_metacarpal'/> -->
<TouchSensor description='HAnimJoint l_index0, HAnimSegment l_index_metacarpal'/>
<Transform translation='0.1983 0.8024 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_index0'/> to <HAnimJoint name='l_index1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_index1' center='0.1983 0.7815 -0.028' name='l_index1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_index_proximal' name='l_index_proximal'>
<!-- <HAnimJoint name='l_index1'/> visualization sphere is placed within <HAnimSegment name='l_index_proximal'/> -->
<TouchSensor description='HAnimJoint l_index1, HAnimSegment l_index_proximal'/>
<Transform translation='0.1983 0.7815 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_index1'/> to <HAnimJoint name='l_index2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_index2' center='0.2017 0.7363 -0.0248' name='l_index2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_index_middle' name='l_index_middle'>
<!-- <HAnimJoint name='l_index2'/> visualization sphere is placed within <HAnimSegment name='l_index_middle'/> -->
<TouchSensor description='HAnimJoint l_index2, HAnimSegment l_index_middle'/>
<Transform translation='0.2017 0.7363 -0.0248' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_index2'/> to <HAnimJoint name='l_index3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_index3' center='0.2028 0.7139 -0.0236' name='l_index3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_index_distal' name='l_index_distal'>
<!-- <HAnimJoint name='l_index3'/> visualization sphere is placed within <HAnimSegment name='l_index_distal'/> -->
<TouchSensor description='HAnimJoint l_index3, HAnimSegment l_index_distal'/>
<Transform translation='0.2028 0.7139 -0.0236' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_index3'/> to <HAnimSite name='l_index_distal_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_index3'/> to <HAnimSite name='l_dactylion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_index_distal_tip' name='l_index_distal_tip' translation='0.2089 0.6858 -0.0245' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_index_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_l_dactylion_pt' name='l_dactylion_pt' translation='0.2056 0.6743 -0.0482' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_dactylion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_l_middle0' center='0.1987 0.8029 -0.053' name='l_middle0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_middle_metacarpal' name='l_middle_metacarpal'>
<!-- <HAnimJoint name='l_middle0'/> visualization sphere is placed within <HAnimSegment name='l_middle_metacarpal'/> -->
<TouchSensor description='HAnimJoint l_middle0, HAnimSegment l_middle_metacarpal'/>
<Transform translation='0.1987 0.8029 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_middle0'/> to <HAnimJoint name='l_middle1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_middle1' center='0.1987 0.7818 -0.053' name='l_middle1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_middle_proximal' name='l_middle_proximal'>
<!-- <HAnimJoint name='l_middle1'/> visualization sphere is placed within <HAnimSegment name='l_middle_proximal'/> -->
<TouchSensor description='HAnimJoint l_middle1, HAnimSegment l_middle_proximal'/>
<Transform translation='0.1987 0.7818 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_middle1'/> to <HAnimJoint name='l_middle2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_middle2' center='0.2013 0.7273 -0.0503' name='l_middle2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_middle_middle' name='l_middle_middle'>
<!-- <HAnimJoint name='l_middle2'/> visualization sphere is placed within <HAnimSegment name='l_middle_middle'/> -->
<TouchSensor description='HAnimJoint l_middle2, HAnimSegment l_middle_middle'/>
<Transform translation='0.2013 0.7273 -0.0503' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_middle2'/> to <HAnimJoint name='l_middle3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_middle3' center='0.2026 0.7011 -0.0494' name='l_middle3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_middle_distal' name='l_middle_distal'>
<!-- <HAnimJoint name='l_middle3'/> visualization sphere is placed within <HAnimSegment name='l_middle_distal'/> -->
<TouchSensor description='HAnimJoint l_middle3, HAnimSegment l_middle_distal'/>
<Transform translation='0.2026 0.7011 -0.0494' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_middle3'/> to <HAnimSite name='l_middle_distal_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_middle_distal_tip' name='l_middle_distal_tip' translation='0.208 0.6731 -0.0491' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_middle_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_l_ring0' center='0.1956 0.8019 -0.0794' name='l_ring0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_ring_metacarpal' name='l_ring_metacarpal'>
<!-- <HAnimJoint name='l_ring0'/> visualization sphere is placed within <HAnimSegment name='l_ring_metacarpal'/> -->
<TouchSensor description='HAnimJoint l_ring0, HAnimSegment l_ring_metacarpal'/>
<Transform translation='0.1956 0.8019 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ring0'/> to <HAnimJoint name='l_ring1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_ring1' center='0.1956 0.7815 -0.0794' name='l_ring1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_ring_proximal' name='l_ring_proximal'>
<!-- <HAnimJoint name='l_ring1'/> visualization sphere is placed within <HAnimSegment name='l_ring_proximal'/> -->
<TouchSensor description='HAnimJoint l_ring1, HAnimSegment l_ring_proximal'/>
<Transform translation='0.1956 0.7815 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ring1'/> to <HAnimJoint name='l_ring2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_ring2' center='0.1973 0.7287 -0.0777' name='l_ring2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_ring_middle' name='l_ring_middle'>
<!-- <HAnimJoint name='l_ring2'/> visualization sphere is placed within <HAnimSegment name='l_ring_middle'/> -->
<TouchSensor description='HAnimJoint l_ring2, HAnimSegment l_ring_middle'/>
<Transform translation='0.1973 0.7287 -0.0777' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ring2'/> to <HAnimJoint name='l_ring3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_ring3' center='0.1983 0.7045 -0.0767' name='l_ring3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_ring_distal' name='l_ring_distal'>
<!-- <HAnimJoint name='l_ring3'/> visualization sphere is placed within <HAnimSegment name='l_ring_distal'/> -->
<TouchSensor description='HAnimJoint l_ring3, HAnimSegment l_ring_distal'/>
<Transform translation='0.1983 0.7045 -0.0767' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ring3'/> to <HAnimSite name='l_ring_distal_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_ring_distal_tip' name='l_ring_distal_tip' translation='0.2035 0.675 -0.0756' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_ring_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_l_pinky0' center='0.1925 0.8066 -0.1036' name='l_pinky0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_pinky_metacarpal' name='l_pinky_metacarpal'>
<!-- <HAnimJoint name='l_pinky0'/> visualization sphere is placed within <HAnimSegment name='l_pinky_metacarpal'/> -->
<TouchSensor description='HAnimJoint l_pinky0, HAnimSegment l_pinky_metacarpal'/>
<Transform translation='0.1925 0.8066 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_pinky0'/> to <HAnimJoint name='l_pinky1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_pinky1' center='0.1925 0.7866 -0.1036' name='l_pinky1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_pinky_proximal' name='l_pinky_proximal'>
<!-- <HAnimJoint name='l_pinky1'/> visualization sphere is placed within <HAnimSegment name='l_pinky_proximal'/> -->
<TouchSensor description='HAnimJoint l_pinky1, HAnimSegment l_pinky_proximal'/>
<Transform translation='0.1925 0.7866 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_pinky1'/> to <HAnimJoint name='l_pinky2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_pinky2' center='0.1938 0.7452 -0.1024' name='l_pinky2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_pinky_middle' name='l_pinky_middle'>
<!-- <HAnimJoint name='l_pinky2'/> visualization sphere is placed within <HAnimSegment name='l_pinky_middle'/> -->
<TouchSensor description='HAnimJoint l_pinky2, HAnimSegment l_pinky_middle'/>
<Transform translation='0.1938 0.7452 -0.1024' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_pinky2'/> to <HAnimJoint name='l_pinky3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_l_pinky3' center='0.1948 0.7277 -0.1017' name='l_pinky3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_l_pinky_distal' name='l_pinky_distal'>
<!-- <HAnimJoint name='l_pinky3'/> visualization sphere is placed within <HAnimSegment name='l_pinky_distal'/> -->
<TouchSensor description='HAnimJoint l_pinky3, HAnimSegment l_pinky_distal'/>
<Transform translation='0.1948 0.7277 -0.1017' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_pinky3'/> to <HAnimSite name='l_pinky_distal_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_l_pinky_distal_tip' name='l_pinky_distal_tip' translation='0.2014 0.7009 -0.1012' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_pinky_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_r_sternoclavicular' center='-0.082 1.4488 -0.0353' name='r_sternoclavicular' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_clavicle' name='r_clavicle'>
<!-- <HAnimJoint name='r_sternoclavicular'/> visualization sphere is placed within <HAnimSegment name='r_clavicle'/> -->
<TouchSensor description='HAnimJoint r_sternoclavicular, HAnimSegment r_clavicle'/>
<Transform translation='-0.082 1.4488 -0.0353' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_sternoclavicular'/> to <HAnimJoint name='r_acromioclavicular'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_clavicale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_acromion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_axilla_ant'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_axilla_post'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_clavicale_pt' name='r_clavicale_pt' translation='-0.0115 1.4943 0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_clavicale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_acromion_pt' name='r_acromion_pt' translation='-0.1905 1.4791 -0.0431' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_acromion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_axilla_ant_pt' name='r_axilla_ant_pt' translation='-0.1626 1.4072 -0.0031' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_axilla_ant'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_axilla_post_pt' name='r_axilla_post_pt' translation='-0.1603 1.4098 -0.0826' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_axilla_post'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_acromioclavicular' center='-0.0962 1.4269 -0.0424' name='r_acromioclavicular' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_scapula' name='r_scapula'>
<!-- <HAnimJoint name='r_acromioclavicular'/> visualization sphere is placed within <HAnimSegment name='r_scapula'/> -->
<TouchSensor description='HAnimJoint r_acromioclavicular, HAnimSegment r_scapula'/>
<Transform translation='-0.0962 1.4269 -0.0424' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_acromioclavicular'/> to <HAnimJoint name='r_shoulder'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_shoulder' center='-0.2029 1.4376 -0.0387' name='r_shoulder' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_upperarm' name='r_upperarm'>
<!-- <HAnimJoint name='r_shoulder'/> visualization sphere is placed within <HAnimSegment name='r_upperarm'/> -->
<TouchSensor description='HAnimJoint r_shoulder, HAnimSegment r_upperarm'/>
<Transform translation='-0.2029 1.4376 -0.0387' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_shoulder'/> to <HAnimJoint name='r_elbow'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_shoulder'/> to <HAnimSite name='r_humeral_lateral_epicn'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_humeral_lateral_epicn_pt' name='r_humeral_lateral_epicn_pt' translation='-0.2224 1.1517 -0.1033' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_humeral_lateral_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_elbow' center='-0.2014 1.1357 -0.0682' name='r_elbow' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_forearm' name='r_forearm'>
<!-- <HAnimJoint name='r_elbow'/> visualization sphere is placed within <HAnimSegment name='r_forearm'/> -->
<TouchSensor description='HAnimJoint r_elbow, HAnimSegment r_forearm'/>
<Transform translation='-0.2014 1.1357 -0.0682' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_elbow'/> to <HAnimJoint name='r_wrist'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_radial_styloid'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_olecranon'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_humeral_medial_epicn'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_radiale'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_radial_styloid_pt' name='r_radial_styloid_pt' translation='-0.1884 0.8676 -0.036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_radial_styloid'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_olecranon_pt' name='r_olecranon_pt' translation='-0.1907 1.1405 -0.1065' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_olecranon'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_humeral_medial_epicn_pt' name='r_humeral_medial_epicn_pt' translation='-0.168 1.1298 -0.1062' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_humeral_medial_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_radiale_pt' name='r_radiale_pt' translation='-0.213 1.1305 -0.1091' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_radiale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_wrist' center='-0.1984 0.8663 -0.0583' name='r_wrist' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_hand' name='r_hand'>
<!-- <HAnimJoint name='r_wrist'/> visualization sphere is placed within <HAnimSegment name='r_hand'/> -->
<TouchSensor description='HAnimJoint r_wrist, HAnimSegment r_hand'/>
<Transform translation='-0.1984 0.8663 -0.0583' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_thumb1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_index0'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_middle0'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_ring0'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_pinky0'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_metacarpal_pha2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_ulnar_styloid'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_metacarpal_pha5'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_hand_front_view'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_metacarpal_pha2_pt' name='r_metacarpal_pha2_pt' translation='-0.1977 0.8169 -0.0177' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_metacarpal_pha2'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_ulnar_styloid_pt' name='r_ulnar_styloid_pt' translation='-0.2117 0.8562 -0.0584' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_ulnar_styloid'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_metacarpal_pha5_pt' name='r_metacarpal_pha5_pt' translation='-0.1929 0.789 -0.1064' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_metacarpal_pha5'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_hand_front_view' name='r_hand_front_view' translation='-0.3 0.75 0.45' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_hand_front_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_r_hand_front_viewpoint' centerOfRotation='0 0.7 0' description='right hand front' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_r_hand_front_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_r_hand_front_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_thumb1' center='-0.1924 0.8472 -0.0534' name='r_thumb1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_thumb_metacarpal' name='r_thumb_metacarpal'>
<!-- <HAnimJoint name='r_thumb1'/> visualization sphere is placed within <HAnimSegment name='r_thumb_metacarpal'/> -->
<TouchSensor description='HAnimJoint r_thumb1, HAnimSegment r_thumb_metacarpal'/>
<Transform translation='-0.1924 0.8472 -0.0534' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_thumb1'/> to <HAnimJoint name='r_thumb2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_thumb2' center='-0.1951 0.8226 0.0246' name='r_thumb2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_thumb_proximal' name='r_thumb_proximal'>
<!-- <HAnimJoint name='r_thumb2'/> visualization sphere is placed within <HAnimSegment name='r_thumb_proximal'/> -->
<TouchSensor description='HAnimJoint r_thumb2, HAnimSegment r_thumb_proximal'/>
<Transform translation='-0.1951 0.8226 0.0246' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_thumb2'/> to <HAnimJoint name='r_thumb3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_thumb3' center='-0.1955 0.8159 0.0464' name='r_thumb3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_thumb_distal' name='r_thumb_distal'>
<!-- <HAnimJoint name='r_thumb3'/> visualization sphere is placed within <HAnimSegment name='r_thumb_distal'/> -->
<TouchSensor description='HAnimJoint r_thumb3, HAnimSegment r_thumb_distal'/>
<Transform translation='-0.1955 0.8159 0.0464' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_thumb3'/> to <HAnimSite name='r_thumb_distal_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_thumb_distal_tip' name='r_thumb_distal_tip' translation='-0.1869 0.809 0.082' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_thumb_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_r_index0' center='-0.1983 0.8024 -0.028' name='r_index0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_index_metacarpal' name='r_index_metacarpal'>
<!-- <HAnimJoint name='r_index0'/> visualization sphere is placed within <HAnimSegment name='r_index_metacarpal'/> -->
<TouchSensor description='HAnimJoint r_index0, HAnimSegment r_index_metacarpal'/>
<Transform translation='-0.1983 0.8024 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_index0'/> to <HAnimJoint name='r_index1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_index1' center='-0.1983 0.7815 -0.028' name='r_index1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_index_proximal' name='r_index_proximal'>
<!-- <HAnimJoint name='r_index1'/> visualization sphere is placed within <HAnimSegment name='r_index_proximal'/> -->
<TouchSensor description='HAnimJoint r_index1, HAnimSegment r_index_proximal'/>
<Transform translation='-0.1983 0.7815 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_index1'/> to <HAnimJoint name='r_index2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_index2' center='-0.2017 0.7363 -0.0248' name='r_index2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_index_middle' name='r_index_middle'>
<!-- <HAnimJoint name='r_index2'/> visualization sphere is placed within <HAnimSegment name='r_index_middle'/> -->
<TouchSensor description='HAnimJoint r_index2, HAnimSegment r_index_middle'/>
<Transform translation='-0.2017 0.7363 -0.0248' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_index2'/> to <HAnimJoint name='r_index3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_index3' center='-0.2028 0.7139 -0.0236' name='r_index3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_index_distal' name='r_index_distal'>
<!-- <HAnimJoint name='r_index3'/> visualization sphere is placed within <HAnimSegment name='r_index_distal'/> -->
<TouchSensor description='HAnimJoint r_index3, HAnimSegment r_index_distal'/>
<Transform translation='-0.2028 0.7139 -0.0236' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_index3'/> to <HAnimSite name='r_index_distal_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_index3'/> to <HAnimSite name='r_dactylion'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_index_distal_tip' name='r_index_distal_tip' translation='-0.198 0.6883 -0.018' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_index_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
<HAnimSite DEF='hanim_r_dactylion_pt' name='r_dactylion_pt' translation='-0.1941 0.6772 -0.0423' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_dactylion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_r_middle0' center='-0.1987 0.8029 -0.053' name='r_middle0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_middle_metacarpal' name='r_middle_metacarpal'>
<!-- <HAnimJoint name='r_middle0'/> visualization sphere is placed within <HAnimSegment name='r_middle_metacarpal'/> -->
<TouchSensor description='HAnimJoint r_middle0, HAnimSegment r_middle_metacarpal'/>
<Transform translation='-0.1987 0.8029 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_middle0'/> to <HAnimJoint name='r_middle1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_middle1' center='-0.1987 0.7818 -0.053' name='r_middle1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_middle_proximal' name='r_middle_proximal'>
<!-- <HAnimJoint name='r_middle1'/> visualization sphere is placed within <HAnimSegment name='r_middle_proximal'/> -->
<TouchSensor description='HAnimJoint r_middle1, HAnimSegment r_middle_proximal'/>
<Transform translation='-0.1987 0.7818 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_middle1'/> to <HAnimJoint name='r_middle2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_middle2' center='-0.2013 0.7273 -0.0503' name='r_middle2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_middle_middle' name='r_middle_middle'>
<!-- <HAnimJoint name='r_middle2'/> visualization sphere is placed within <HAnimSegment name='r_middle_middle'/> -->
<TouchSensor description='HAnimJoint r_middle2, HAnimSegment r_middle_middle'/>
<Transform translation='-0.2013 0.7273 -0.0503' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_middle2'/> to <HAnimJoint name='r_middle3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_middle3' center='-0.2026 0.7011 -0.0494' name='r_middle3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_middle_distal' name='r_middle_distal'>
<!-- <HAnimJoint name='r_middle3'/> visualization sphere is placed within <HAnimSegment name='r_middle_distal'/> -->
<TouchSensor description='HAnimJoint r_middle3, HAnimSegment r_middle_distal'/>
<Transform translation='-0.2026 0.7011 -0.0494' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_middle3'/> to <HAnimSite name='r_middle_distal_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_middle_distal_tip' name='r_middle_distal_tip' translation='-0.1969 0.6758 -0.0427' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_middle_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_r_ring0' center='-0.1956 0.8019 -0.0794' name='r_ring0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_ring_metacarpal' name='r_ring_metacarpal'>
<!-- <HAnimJoint name='r_ring0'/> visualization sphere is placed within <HAnimSegment name='r_ring_metacarpal'/> -->
<TouchSensor description='HAnimJoint r_ring0, HAnimSegment r_ring_metacarpal'/>
<Transform translation='-0.1956 0.8019 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ring0'/> to <HAnimJoint name='r_ring1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_ring1' center='-0.1956 0.7815 -0.0794' name='r_ring1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_ring_proximal' name='r_ring_proximal'>
<!-- <HAnimJoint name='r_ring1'/> visualization sphere is placed within <HAnimSegment name='r_ring_proximal'/> -->
<TouchSensor description='HAnimJoint r_ring1, HAnimSegment r_ring_proximal'/>
<Transform translation='-0.1956 0.7815 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ring1'/> to <HAnimJoint name='r_ring2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_ring2' center='-0.1973 0.7287 -0.0777' name='r_ring2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_ring_middle' name='r_ring_middle'>
<!-- <HAnimJoint name='r_ring2'/> visualization sphere is placed within <HAnimSegment name='r_ring_middle'/> -->
<TouchSensor description='HAnimJoint r_ring2, HAnimSegment r_ring_middle'/>
<Transform translation='-0.1973 0.7287 -0.0777' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ring2'/> to <HAnimJoint name='r_ring3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_ring3' center='-0.1983 0.7045 -0.0767' name='r_ring3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_ring_distal' name='r_ring_distal'>
<!-- <HAnimJoint name='r_ring3'/> visualization sphere is placed within <HAnimSegment name='r_ring_distal'/> -->
<TouchSensor description='HAnimJoint r_ring3, HAnimSegment r_ring_distal'/>
<Transform translation='-0.1983 0.7045 -0.0767' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ring3'/> to <HAnimSite name='r_ring_distal_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_ring_distal_tip' name='r_ring_distal_tip' translation='-0.1934 0.6778 -0.0693' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_ring_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<HAnimJoint DEF='hanim_r_pinky0' center='-0.1925 0.8066 -0.1036' name='r_pinky0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_pinky_metacarpal' name='r_pinky_metacarpal'>
<!-- <HAnimJoint name='r_pinky0'/> visualization sphere is placed within <HAnimSegment name='r_pinky_metacarpal'/> -->
<TouchSensor description='HAnimJoint r_pinky0, HAnimSegment r_pinky_metacarpal'/>
<Transform translation='-0.1925 0.8066 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_pinky0'/> to <HAnimJoint name='r_pinky1'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_pinky1' center='-0.1925 0.7866 -0.1036' name='r_pinky1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_pinky_proximal' name='r_pinky_proximal'>
<!-- <HAnimJoint name='r_pinky1'/> visualization sphere is placed within <HAnimSegment name='r_pinky_proximal'/> -->
<TouchSensor description='HAnimJoint r_pinky1, HAnimSegment r_pinky_proximal'/>
<Transform translation='-0.1925 0.7866 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_pinky1'/> to <HAnimJoint name='r_pinky2'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_pinky2' center='-0.1938 0.7452 -0.1024' name='r_pinky2' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_pinky_middle' name='r_pinky_middle'>
<!-- <HAnimJoint name='r_pinky2'/> visualization sphere is placed within <HAnimSegment name='r_pinky_middle'/> -->
<TouchSensor description='HAnimJoint r_pinky2, HAnimSegment r_pinky_middle'/>
<Transform translation='-0.1938 0.7452 -0.1024' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_pinky2'/> to <HAnimJoint name='r_pinky3'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
<HAnimJoint DEF='hanim_r_pinky3' center='-0.1948 0.7277 -0.1017' name='r_pinky3' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<HAnimSegment DEF='hanim_r_pinky_distal' name='r_pinky_distal'>
<!-- <HAnimJoint name='r_pinky3'/> visualization sphere is placed within <HAnimSegment name='r_pinky_distal'/> -->
<TouchSensor description='HAnimJoint r_pinky3, HAnimSegment r_pinky_distal'/>
<Transform translation='-0.1948 0.7277 -0.1017' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</Transform>
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_pinky3'/> to <HAnimSite name='r_pinky_distal_tip'/> -->
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
<HAnimSite DEF='hanim_r_pinky_distal_tip' name='r_pinky_distal_tip' translation='-0.1938 0.7035 -0.0949' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_pinky_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<HAnimSite DEF='hanim_l_inclined_view' containerField='viewpoints' name='l_inclined_view' rotation='-0.113 0.993 0.0347 0.671' translation='1.62 1.05 2.06' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_inclined_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_l_inclined_viewpoint' description='left inclined' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_l_inclined_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_l_inclined_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_r_inclined_view' containerField='viewpoints' name='r_inclined_view' rotation='-0.113 -0.993 0.0347 0.671' translation='-1.62 1.05 2.06' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite r_inclined_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_r_inclined_viewpoint' centerOfRotation='0 0.9 0' description='right inclined' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_r_inclined_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_r_inclined_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_front_view' containerField='viewpoints' name='front_view' translation='0 0.85 2.58' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite front_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_front_viewpoint' centerOfRotation='0 0.9 0' description='front' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_front_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_front_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_back_view' containerField='viewpoints' name='back_view' rotation='0 1 0 3.14' translation='0 0.85 -2.58' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite back_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_back_viewpoint' centerOfRotation='0 0.9 0' description='back' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_back_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_back_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_l_side_view' containerField='viewpoints' name='l_side_view' rotation='0 1 0 1.5708' translation='2.6 0.854 0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite l_side_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_l_side_viewpoint' centerOfRotation='0 0.9 0' description='left side' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_l_side_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_l_side_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_Top_view' containerField='viewpoints' name='Top_view' rotation='1 0 0 -1.57' translation='0 3.5 0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite Top_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_Top_viewpoint' centerOfRotation='0 0.9 0' description='Top' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_Top_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_Top_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
<HAnimSite DEF='hanim_front_close_view' containerField='viewpoints' name='front_close_view' translation='0 0.854 1.575' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_front_close_viewpoint' centerOfRotation='0 0 1.575' description='front close' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_side_close_view' containerField='viewpoints' name='side_close_view' rotation='0 1 0 1.5708' translation='1.56 0.854 0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite side_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_side_close_viewpoint' centerOfRotation='1.6 0 0' description='side close' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_side_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_side_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_head_front_close_view' containerField='viewpoints' name='head_front_close_view' translation='0 1.5 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite head_front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_head_front_close_viewpoint' centerOfRotation='0 0 1' description='head front close' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_head_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_head_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_chest_front_close_view' containerField='viewpoints' name='chest_front_close_view' translation='0 1.2 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite chest_front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_chest_front_close_viewpoint' centerOfRotation='0 0 1' description='chest front close' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_chest_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_chest_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_pelvis_front_close_view' containerField='viewpoints' name='pelvis_front_close_view' translation='0 0.8 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite pelvis_front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_pelvis_front_close_viewpoint' centerOfRotation='0 0 1' description='pelvis front close' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_pelvis_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_pelvis_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_knees_front_close_view' containerField='viewpoints' name='knees_front_close_view' translation='0 0.4 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite knees_front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_knees_front_close_viewpoint' centerOfRotation='0 0.4 0' description='knees front close' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_knees_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_knees_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimSite DEF='hanim_feet_front_close_view' containerField='viewpoints' name='feet_front_close_view' translation='0 0 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite feet_front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_feet_front_close_viewpoint' description='feet front close' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_feet_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_feet_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<!-- right between the eyes, stationary position not animating except with body itself -->
<HAnimSite DEF='hanim_eye_level_view' containerField='viewpoints' name='eye_level_view' translation='0 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- HAnimSite visualization shape -->
<TouchSensor description='HAnimSite eye_level_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_eye_level_viewpoint' description='eye level looking forward' orientation='0 1 0 3.141593' position='0 0 0'/>
<!-- HAnimSite/Viewpoint visualization shape -->
<Anchor description='HAnimSite hanim_eye_level_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_eye_level_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
</HAnimSite>
<HAnimJoint USE='hanim_humanoid_root' containerField='joints'/>
<HAnimJoint USE='hanim_sacroiliac' containerField='joints'/>
<HAnimJoint USE='hanim_vl5' containerField='joints'/>
<HAnimJoint USE='hanim_vl4' containerField='joints'/>
<HAnimJoint USE='hanim_vl3' containerField='joints'/>
<HAnimJoint USE='hanim_vl2' containerField='joints'/>
<HAnimJoint USE='hanim_vl1' containerField='joints'/>
<HAnimJoint USE='hanim_vt12' containerField='joints'/>
<HAnimJoint USE='hanim_vt11' containerField='joints'/>
<HAnimJoint USE='hanim_vt10' containerField='joints'/>
<HAnimJoint USE='hanim_vt9' containerField='joints'/>
<HAnimJoint USE='hanim_vt8' containerField='joints'/>
<HAnimJoint USE='hanim_vt7' containerField='joints'/>
<HAnimJoint USE='hanim_vt6' containerField='joints'/>
<HAnimJoint USE='hanim_vt5' containerField='joints'/>
<HAnimJoint USE='hanim_vt4' containerField='joints'/>
<HAnimJoint USE='hanim_vt3' containerField='joints'/>
<HAnimJoint USE='hanim_vt2' containerField='joints'/>
<HAnimJoint USE='hanim_vt1' containerField='joints'/>
<HAnimJoint USE='hanim_vc7' containerField='joints'/>
<HAnimJoint USE='hanim_vc6' containerField='joints'/>
<HAnimJoint USE='hanim_vc5' containerField='joints'/>
<HAnimJoint USE='hanim_vc4' containerField='joints'/>
<HAnimJoint USE='hanim_vc3' containerField='joints'/>
<HAnimJoint USE='hanim_vc2' containerField='joints'/>
<HAnimJoint USE='hanim_vc1' containerField='joints'/>
<HAnimJoint USE='hanim_skullbase' containerField='joints'/>
<HAnimJoint USE='hanim_temporomandibular' containerField='joints'/>
<HAnimJoint USE='hanim_l_acromioclavicular' containerField='joints'/>
<HAnimJoint USE='hanim_r_acromioclavicular' containerField='joints'/>
<HAnimJoint USE='hanim_l_ankle' containerField='joints'/>
<HAnimJoint USE='hanim_r_ankle' containerField='joints'/>
<HAnimJoint USE='hanim_l_elbow' containerField='joints'/>
<HAnimJoint USE='hanim_r_elbow' containerField='joints'/>
<HAnimJoint USE='hanim_l_eyeball_joint' containerField='joints'/>
<HAnimJoint USE='hanim_r_eyeball_joint' containerField='joints'/>
<HAnimJoint USE='hanim_l_eyebrow_joint' containerField='joints'/>
<HAnimJoint USE='hanim_r_eyebrow_joint' containerField='joints'/>
<HAnimJoint USE='hanim_l_eyelid_joint' containerField='joints'/>
<HAnimJoint USE='hanim_r_eyelid_joint' containerField='joints'/>
<HAnimJoint USE='hanim_l_hip' containerField='joints'/>
<HAnimJoint USE='hanim_r_hip' containerField='joints'/>
<HAnimJoint USE='hanim_l_index0' containerField='joints'/>
<HAnimJoint USE='hanim_r_index0' containerField='joints'/>
<HAnimJoint USE='hanim_l_index1' containerField='joints'/>
<HAnimJoint USE='hanim_r_index1' containerField='joints'/>
<HAnimJoint USE='hanim_l_index2' containerField='joints'/>
<HAnimJoint USE='hanim_r_index2' containerField='joints'/>
<HAnimJoint USE='hanim_l_index3' containerField='joints'/>
<HAnimJoint USE='hanim_r_index3' containerField='joints'/>
<HAnimJoint USE='hanim_l_knee' containerField='joints'/>
<HAnimJoint USE='hanim_r_knee' containerField='joints'/>
<HAnimJoint USE='hanim_l_metatarsal' containerField='joints'/>
<HAnimJoint USE='hanim_r_metatarsal' containerField='joints'/>
<HAnimJoint USE='hanim_l_middle0' containerField='joints'/>
<HAnimJoint USE='hanim_r_middle0' containerField='joints'/>
<HAnimJoint USE='hanim_l_middle1' containerField='joints'/>
<HAnimJoint USE='hanim_r_middle1' containerField='joints'/>
<HAnimJoint USE='hanim_l_middle2' containerField='joints'/>
<HAnimJoint USE='hanim_r_middle2' containerField='joints'/>
<HAnimJoint USE='hanim_l_middle3' containerField='joints'/>
<HAnimJoint USE='hanim_r_middle3' containerField='joints'/>
<HAnimJoint USE='hanim_l_midtarsal' containerField='joints'/>
<HAnimJoint USE='hanim_r_midtarsal' containerField='joints'/>
<HAnimJoint USE='hanim_l_pinky0' containerField='joints'/>
<HAnimJoint USE='hanim_r_pinky0' containerField='joints'/>
<HAnimJoint USE='hanim_l_pinky1' containerField='joints'/>
<HAnimJoint USE='hanim_r_pinky1' containerField='joints'/>
<HAnimJoint USE='hanim_l_pinky2' containerField='joints'/>
<HAnimJoint USE='hanim_r_pinky2' containerField='joints'/>
<HAnimJoint USE='hanim_l_pinky3' containerField='joints'/>
<HAnimJoint USE='hanim_r_pinky3' containerField='joints'/>
<HAnimJoint USE='hanim_l_ring0' containerField='joints'/>
<HAnimJoint USE='hanim_r_ring0' containerField='joints'/>
<HAnimJoint USE='hanim_l_ring1' containerField='joints'/>
<HAnimJoint USE='hanim_r_ring1' containerField='joints'/>
<HAnimJoint USE='hanim_l_ring2' containerField='joints'/>
<HAnimJoint USE='hanim_r_ring2' containerField='joints'/>
<HAnimJoint USE='hanim_l_ring3' containerField='joints'/>
<HAnimJoint USE='hanim_r_ring3' containerField='joints'/>
<HAnimJoint USE='hanim_l_shoulder' containerField='joints'/>
<HAnimJoint USE='hanim_r_shoulder' containerField='joints'/>
<HAnimJoint USE='hanim_l_sternoclavicular' containerField='joints'/>
<HAnimJoint USE='hanim_r_sternoclavicular' containerField='joints'/>
<HAnimJoint USE='hanim_l_subtalar' containerField='joints'/>
<HAnimJoint USE='hanim_r_subtalar' containerField='joints'/>
<HAnimJoint USE='hanim_l_thumb1' containerField='joints'/>
<HAnimJoint USE='hanim_r_thumb1' containerField='joints'/>
<HAnimJoint USE='hanim_l_thumb2' containerField='joints'/>
<HAnimJoint USE='hanim_r_thumb2' containerField='joints'/>
<HAnimJoint USE='hanim_l_thumb3' containerField='joints'/>
<HAnimJoint USE='hanim_r_thumb3' containerField='joints'/>
<HAnimJoint USE='hanim_l_wrist' containerField='joints'/>
<HAnimJoint USE='hanim_r_wrist' containerField='joints'/>
<HAnimSegment USE='hanim_pelvis' containerField='segments'/>
<HAnimSegment USE='hanim_skull' containerField='segments'/>
<HAnimSegment USE='hanim_jaw' containerField='segments'/>
<HAnimSegment USE='hanim_c1' containerField='segments'/>
<HAnimSegment USE='hanim_c2' containerField='segments'/>
<HAnimSegment USE='hanim_c3' containerField='segments'/>
<HAnimSegment USE='hanim_c4' containerField='segments'/>
<HAnimSegment USE='hanim_c5' containerField='segments'/>
<HAnimSegment USE='hanim_c6' containerField='segments'/>
<HAnimSegment USE='hanim_c7' containerField='segments'/>
<HAnimSegment USE='hanim_t1' containerField='segments'/>
<HAnimSegment USE='hanim_t2' containerField='segments'/>
<HAnimSegment USE='hanim_t3' containerField='segments'/>
<HAnimSegment USE='hanim_t4' containerField='segments'/>
<HAnimSegment USE='hanim_t5' containerField='segments'/>
<HAnimSegment USE='hanim_t6' containerField='segments'/>
<HAnimSegment USE='hanim_t7' containerField='segments'/>
<HAnimSegment USE='hanim_t8' containerField='segments'/>
<HAnimSegment USE='hanim_t9' containerField='segments'/>
<HAnimSegment USE='hanim_t10' containerField='segments'/>
<HAnimSegment USE='hanim_t11' containerField='segments'/>
<HAnimSegment USE='hanim_t12' containerField='segments'/>
<HAnimSegment USE='hanim_l1' containerField='segments'/>
<HAnimSegment USE='hanim_l2' containerField='segments'/>
<HAnimSegment USE='hanim_l3' containerField='segments'/>
<HAnimSegment USE='hanim_l4' containerField='segments'/>
<HAnimSegment USE='hanim_l5' containerField='segments'/>
<HAnimSegment USE='hanim_sacrum' containerField='segments'/>
<HAnimSegment USE='hanim_l_calf' containerField='segments'/>
<HAnimSegment USE='hanim_r_calf' containerField='segments'/>
<HAnimSegment USE='hanim_l_clavicle' containerField='segments'/>
<HAnimSegment USE='hanim_r_clavicle' containerField='segments'/>
<HAnimSegment USE='hanim_l_eyeball' containerField='segments'/>
<HAnimSegment USE='hanim_r_eyeball' containerField='segments'/>
<HAnimSegment USE='hanim_l_eyebrow' containerField='segments'/>
<HAnimSegment USE='hanim_r_eyebrow' containerField='segments'/>
<HAnimSegment USE='hanim_l_eyelid' containerField='segments'/>
<HAnimSegment USE='hanim_r_eyelid' containerField='segments'/>
<HAnimSegment USE='hanim_l_forearm' containerField='segments'/>
<HAnimSegment USE='hanim_r_forearm' containerField='segments'/>
<HAnimSegment USE='hanim_l_forefoot' containerField='segments'/>
<HAnimSegment USE='hanim_r_forefoot' containerField='segments'/>
<HAnimSegment USE='hanim_l_hand' containerField='segments'/>
<HAnimSegment USE='hanim_r_hand' containerField='segments'/>
<HAnimSegment USE='hanim_l_hindfoot' containerField='segments'/>
<HAnimSegment USE='hanim_r_hindfoot' containerField='segments'/>
<HAnimSegment USE='hanim_l_index_distal' containerField='segments'/>
<HAnimSegment USE='hanim_r_index_distal' containerField='segments'/>
<HAnimSegment USE='hanim_l_index_metacarpal' containerField='segments'/>
<HAnimSegment USE='hanim_r_index_metacarpal' containerField='segments'/>
<HAnimSegment USE='hanim_l_index_middle' containerField='segments'/>
<HAnimSegment USE='hanim_r_index_middle' containerField='segments'/>
<HAnimSegment USE='hanim_l_index_proximal' containerField='segments'/>
<HAnimSegment USE='hanim_r_index_proximal' containerField='segments'/>
<HAnimSegment USE='hanim_l_middistal' containerField='segments'/>
<HAnimSegment USE='hanim_r_middistal' containerField='segments'/>
<HAnimSegment USE='hanim_l_middle_distal' containerField='segments'/>
<HAnimSegment USE='hanim_r_middle_distal' containerField='segments'/>
<HAnimSegment USE='hanim_l_middle_metacarpal' containerField='segments'/>
<HAnimSegment USE='hanim_r_middle_metacarpal' containerField='segments'/>
<HAnimSegment USE='hanim_l_middle_middle' containerField='segments'/>
<HAnimSegment USE='hanim_r_middle_middle' containerField='segments'/>
<HAnimSegment USE='hanim_l_middle_proximal' containerField='segments'/>
<HAnimSegment USE='hanim_r_middle_proximal' containerField='segments'/>
<HAnimSegment USE='hanim_l_midproximal' containerField='segments'/>
<HAnimSegment USE='hanim_r_midproximal' containerField='segments'/>
<HAnimSegment USE='hanim_l_pinky_distal' containerField='segments'/>
<HAnimSegment USE='hanim_r_pinky_distal' containerField='segments'/>
<HAnimSegment USE='hanim_l_pinky_metacarpal' containerField='segments'/>
<HAnimSegment USE='hanim_r_pinky_metacarpal' containerField='segments'/>
<HAnimSegment USE='hanim_l_pinky_middle' containerField='segments'/>
<HAnimSegment USE='hanim_r_pinky_middle' containerField='segments'/>
<HAnimSegment USE='hanim_l_pinky_proximal' containerField='segments'/>
<HAnimSegment USE='hanim_r_pinky_proximal' containerField='segments'/>
<HAnimSegment USE='hanim_l_ring_distal' containerField='segments'/>
<HAnimSegment USE='hanim_r_ring_distal' containerField='segments'/>
<HAnimSegment USE='hanim_l_ring_metacarpal' containerField='segments'/>
<HAnimSegment USE='hanim_r_ring_metacarpal' containerField='segments'/>
<HAnimSegment USE='hanim_l_ring_middle' containerField='segments'/>
<HAnimSegment USE='hanim_r_ring_middle' containerField='segments'/>
<HAnimSegment USE='hanim_l_ring_proximal' containerField='segments'/>
<HAnimSegment USE='hanim_r_ring_proximal' containerField='segments'/>
<HAnimSegment USE='hanim_l_scapula' containerField='segments'/>
<HAnimSegment USE='hanim_r_scapula' containerField='segments'/>
<HAnimSegment USE='hanim_l_thigh' containerField='segments'/>
<HAnimSegment USE='hanim_r_thigh' containerField='segments'/>
<HAnimSegment USE='hanim_l_thumb_distal' containerField='segments'/>
<HAnimSegment USE='hanim_r_thumb_distal' containerField='segments'/>
<HAnimSegment USE='hanim_l_thumb_metacarpal' containerField='segments'/>
<HAnimSegment USE='hanim_r_thumb_metacarpal' containerField='segments'/>
<HAnimSegment USE='hanim_l_thumb_proximal' containerField='segments'/>
<HAnimSegment USE='hanim_r_thumb_proximal' containerField='segments'/>
<HAnimSegment USE='hanim_l_upperarm' containerField='segments'/>
<HAnimSegment USE='hanim_r_upperarm' containerField='segments'/>
<HAnimSite USE='hanim_crotch_pt' containerField='sites'/>
<HAnimSite USE='hanim_skull_tip' containerField='sites'/>
<HAnimSite USE='hanim_sellion_pt' containerField='sites'/>
<HAnimSite USE='hanim_supramenton_pt' containerField='sites'/>
<HAnimSite USE='hanim_nuchale_pt' containerField='sites'/>
<HAnimSite USE='hanim_suprasternale_pt' containerField='sites'/>
<HAnimSite USE='hanim_cervicale_pt' containerField='sites'/>
<HAnimSite USE='hanim_substernale_pt' containerField='sites'/>
<HAnimSite USE='hanim_rib10_midspine_pt' containerField='sites'/>
<HAnimSite USE='hanim_waist_preferred_post_pt' containerField='sites'/>
<HAnimSite USE='hanim_navel_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_acromion_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_acromion_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_asis_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_asis_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_axilla_ant_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_axilla_ant_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_axilla_post_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_axilla_post_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_calcaneous_post_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_calcaneous_post_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_clavicale_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_clavicale_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_dactylion_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_dactylion_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_digit2_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_digit2_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_eyeball_site_view' containerField='viewpoints'/>
<HAnimSite USE='hanim_r_eyeball_site_view' containerField='viewpoints'/>
<HAnimSite USE='hanim_l_femoral_lateral_epicn_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_femoral_lateral_epicn_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_femoral_medial_epicn_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_femoral_medial_epicn_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_forefoot_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_forefoot_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_gonion_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_gonion_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_hand_front_view' containerField='viewpoints'/>
<HAnimSite USE='hanim_r_hand_front_view' containerField='viewpoints'/>
<HAnimSite USE='hanim_l_humeral_lateral_epicn_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_humeral_lateral_epicn_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_humeral_medial_epicn_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_humeral_medial_epicn_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_iliocristale_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_iliocristale_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_index_distal_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_index_distal_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_infraorbitale_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_infraorbitale_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_knee_crease_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_knee_crease_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_lateral_malleolus_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_lateral_malleolus_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_medial_malleolus_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_medial_malleolus_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_metacarpal_pha2_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_metacarpal_pha2_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_metacarpal_pha5_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_metacarpal_pha5_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_metatarsal_pha1_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_metatarsal_pha1_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_metatarsal_pha5_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_metatarsal_pha5_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_middle_distal_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_middle_distal_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_neck_base_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_neck_base_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_olecranon_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_olecranon_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_pinky_distal_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_pinky_distal_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_psis_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_psis_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_radial_styloid_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_radial_styloid_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_radiale_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_radiale_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_rib10_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_rib10_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_ring_distal_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_ring_distal_tip' containerField='sites'/>
<HAnimSite USE='hanim_temporomandibular_l_site_pt' containerField='sites'/>
<HAnimSite USE='hanim_temporomandibular_r_site_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_sphyrion_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_sphyrion_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_thelion_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_thelion_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_thumb_distal_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_thumb_distal_tip' containerField='sites'/>
<HAnimSite USE='hanim_r_tragion_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_tragion_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_trochanterion_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_trochanterion_pt' containerField='sites'/>
<HAnimSite USE='hanim_l_ulnar_styloid_pt' containerField='sites'/>
<HAnimSite USE='hanim_r_ulnar_styloid_pt' containerField='sites'/>
</HAnimHumanoid>
</Scene>
</X3D>
<!--
Visualization report for HAnimHumanoid model:
humanoid HAnimHumanoid Report
Index for DEF nodes
:
DiamondIFS,
hanim_back_view,
hanim_back_viewpoint,
hanim_c1,
hanim_c2,
hanim_c3,
hanim_c4,
hanim_c5,
hanim_c6,
hanim_c7,
hanim_cervicale_pt,
hanim_chest_front_close_view,
hanim_chest_front_close_viewpoint,
hanim_crotch_pt,
hanim_eye_level_view,
hanim_eye_level_viewpoint,
hanim_feet_front_close_view,
hanim_feet_front_close_viewpoint,
hanim_front_close_view,
hanim_front_close_viewpoint,
hanim_front_view,
hanim_front_viewpoint,
hanim_head_front_close_view,
hanim_head_front_close_viewpoint,
hanim_humanoid,
hanim_humanoid_root,
hanim_jaw,
hanim_knees_front_close_view,
hanim_knees_front_close_viewpoint,
hanim_l_acromioclavicular,
hanim_l_acromion_pt,
hanim_l_ankle,
hanim_l_asis_pt,
hanim_l_axilla_ant_pt,
hanim_l_axilla_post_pt,
hanim_l_calcaneous_post_pt,
hanim_l_calf,
hanim_l_clavicale_pt,
hanim_l_clavicle,
hanim_l_dactylion_pt,
hanim_l_digit2_pt,
hanim_l_elbow,
hanim_l_eyeball,
hanim_l_eyeball_joint,
hanim_l_eyeball_site_view,
hanim_l_eyeball_site_viewpoint,
hanim_l_eyebrow,
hanim_l_eyebrow_joint,
hanim_l_eyelid,
hanim_l_eyelid_joint,
hanim_l_femoral_lateral_epicn_pt,
hanim_l_femoral_medial_epicn_pt,
hanim_l_forearm,
hanim_l_forefoot,
hanim_l_forefoot_tip,
hanim_l_gonion_pt,
hanim_l_hand,
hanim_l_hand_front_view,
hanim_l_hand_front_viewpoint,
hanim_l_hindfoot,
hanim_l_hip,
hanim_l_humeral_lateral_epicn_pt,
hanim_l_humeral_medial_epicn_pt,
hanim_l_iliocristale_pt,
hanim_l_inclined_view,
hanim_l_inclined_viewpoint,
hanim_l_index_distal,
hanim_l_index_distal_tip,
hanim_l_index_metacarpal,
hanim_l_index_middle,
hanim_l_index_proximal,
hanim_l_index0,
hanim_l_index1,
hanim_l_index2,
hanim_l_index3,
hanim_l_infraorbitale_pt,
hanim_l_knee,
hanim_l_knee_crease_pt,
hanim_l_lateral_malleolus_pt,
hanim_l_medial_malleolus_pt,
hanim_l_metacarpal_pha2_pt,
hanim_l_metacarpal_pha5_pt,
hanim_l_metatarsal,
hanim_l_metatarsal_pha1_pt,
hanim_l_metatarsal_pha5_pt,
hanim_l_middistal,
hanim_l_middle_distal,
hanim_l_middle_distal_tip,
hanim_l_middle_metacarpal,
hanim_l_middle_middle,
hanim_l_middle_proximal,
hanim_l_middle0,
hanim_l_middle1,
hanim_l_middle2,
hanim_l_middle3,
hanim_l_midproximal,
hanim_l_midtarsal,
hanim_l_neck_base_pt,
hanim_l_olecranon_pt,
hanim_l_pinky_distal,
hanim_l_pinky_distal_tip,
hanim_l_pinky_metacarpal,
hanim_l_pinky_middle,
hanim_l_pinky_proximal,
hanim_l_pinky0,
hanim_l_pinky1,
hanim_l_pinky2,
hanim_l_pinky3,
hanim_l_psis_pt,
hanim_l_radial_styloid_pt,
hanim_l_radiale_pt,
hanim_l_rib10_pt,
hanim_l_ring_distal,
hanim_l_ring_distal_tip,
hanim_l_ring_metacarpal,
hanim_l_ring_middle,
hanim_l_ring_proximal,
hanim_l_ring0,
hanim_l_ring1,
hanim_l_ring2,
hanim_l_ring3,
hanim_l_scapula,
hanim_l_shoulder,
hanim_l_side_view,
hanim_l_side_viewpoint,
hanim_l_sphyrion_pt,
hanim_l_sternoclavicular,
hanim_l_subtalar,
hanim_l_thelion_pt,
hanim_l_thigh,
hanim_l_thumb_distal,
hanim_l_thumb_distal_tip,
hanim_l_thumb_metacarpal,
hanim_l_thumb_proximal,
hanim_l_thumb1,
hanim_l_thumb2,
hanim_l_thumb3,
hanim_l_tragion_pt,
hanim_l_trochanterion_pt,
hanim_l_ulnar_styloid_pt,
hanim_l_upperarm,
hanim_l_wrist,
hanim_l1,
hanim_l2,
hanim_l3,
hanim_l4,
hanim_l5,
hanim_navel_pt,
hanim_nuchale_pt,
hanim_pelvis,
hanim_pelvis_front_close_view,
hanim_pelvis_front_close_viewpoint,
hanim_r_acromioclavicular,
hanim_r_acromion_pt,
hanim_r_ankle,
hanim_r_asis_pt,
hanim_r_axilla_ant_pt,
hanim_r_axilla_post_pt,
hanim_r_calcaneous_post_pt,
hanim_r_calf,
hanim_r_clavicale_pt,
hanim_r_clavicle,
hanim_r_dactylion_pt,
hanim_r_digit2_pt,
hanim_r_elbow,
hanim_r_eyeball,
hanim_r_eyeball_joint,
hanim_r_eyeball_site_view,
hanim_r_eyeball_site_viewpoint,
hanim_r_eyebrow,
hanim_r_eyebrow_joint,
hanim_r_eyelid,
hanim_r_eyelid_joint,
hanim_r_femoral_lateral_epicn_pt,
hanim_r_femoral_medial_epicn_pt,
hanim_r_forearm,
hanim_r_forefoot,
hanim_r_forefoot_tip,
hanim_r_gonion_pt,
hanim_r_hand,
hanim_r_hand_front_view,
hanim_r_hand_front_viewpoint,
hanim_r_hindfoot,
hanim_r_hip,
hanim_r_humeral_lateral_epicn_pt,
hanim_r_humeral_medial_epicn_pt,
hanim_r_iliocristale_pt,
hanim_r_inclined_view,
hanim_r_inclined_viewpoint,
hanim_r_index_distal,
hanim_r_index_distal_tip,
hanim_r_index_metacarpal,
hanim_r_index_middle,
hanim_r_index_proximal,
hanim_r_index0,
hanim_r_index1,
hanim_r_index2,
hanim_r_index3,
hanim_r_infraorbitale_pt,
hanim_r_knee,
hanim_r_knee_crease_pt,
hanim_r_lateral_malleolus_pt,
hanim_r_medial_malleolus_pt,
hanim_r_metacarpal_pha2_pt,
hanim_r_metacarpal_pha5_pt,
hanim_r_metatarsal,
hanim_r_metatarsal_pha1_pt,
hanim_r_metatarsal_pha5_pt,
hanim_r_middistal,
hanim_r_middle_distal,
hanim_r_middle_distal_tip,
hanim_r_middle_metacarpal,
hanim_r_middle_middle,
hanim_r_middle_proximal,
hanim_r_middle0,
hanim_r_middle1,
hanim_r_middle2,
hanim_r_middle3,
hanim_r_midproximal,
hanim_r_midtarsal,
hanim_r_neck_base_pt,
hanim_r_olecranon_pt,
hanim_r_pinky_distal,
hanim_r_pinky_distal_tip,
hanim_r_pinky_metacarpal,
hanim_r_pinky_middle,
hanim_r_pinky_proximal,
hanim_r_pinky0,
hanim_r_pinky1,
hanim_r_pinky2,
hanim_r_pinky3,
hanim_r_psis_pt,
hanim_r_radial_styloid_pt,
hanim_r_radiale_pt,
hanim_r_rib10_pt,
hanim_r_ring_distal,
hanim_r_ring_distal_tip,
hanim_r_ring_metacarpal,
hanim_r_ring_middle,
hanim_r_ring_proximal,
hanim_r_ring0,
hanim_r_ring1,
hanim_r_ring2,
hanim_r_ring3,
hanim_r_scapula,
hanim_r_shoulder,
hanim_r_sphyrion_pt,
hanim_r_sternoclavicular,
hanim_r_subtalar,
hanim_r_thelion_pt,
hanim_r_thigh,
hanim_r_thumb_distal,
hanim_r_thumb_distal_tip,
hanim_r_thumb_metacarpal,
hanim_r_thumb_proximal,
hanim_r_thumb1,
hanim_r_thumb2,
hanim_r_thumb3,
hanim_r_tragion_pt,
hanim_r_trochanterion_pt,
hanim_r_ulnar_styloid_pt,
hanim_r_upperarm,
hanim_r_wrist,
hanim_rib10_midspine_pt,
hanim_sacroiliac,
hanim_sacrum,
hanim_sellion_pt,
hanim_side_close_view,
hanim_side_close_viewpoint,
hanim_skull,
hanim_skull_tip,
hanim_skullbase,
hanim_substernale_pt,
hanim_supramenton_pt,
hanim_suprasternale_pt,
hanim_t1,
hanim_t10,
hanim_t11,
hanim_t12,
hanim_t2,
hanim_t3,
hanim_t4,
hanim_t5,
hanim_t6,
hanim_t7,
hanim_t8,
hanim_t9,
hanim_temporomandibular,
hanim_temporomandibular_l_site_pt,
hanim_temporomandibular_r_site_pt,
hanim_Top_view,
hanim_Top_viewpoint,
hanim_vc1,
hanim_vc2,
hanim_vc3,
hanim_vc4,
hanim_vc5,
hanim_vc6,
hanim_vc7,
hanim_vl1,
hanim_vl2,
hanim_vl3,
hanim_vl4,
hanim_vl5,
hanim_vt1,
hanim_vt10,
hanim_vt11,
hanim_vt12,
hanim_vt2,
hanim_vt3,
hanim_vt4,
hanim_vt5,
hanim_vt6,
hanim_vt7,
hanim_vt8,
hanim_vt9,
hanim_waist_preferred_post_pt,
HAnimJointAppearance,
HAnimJointShape,
HAnimSegmentLineColorRGBA,
HAnimSiteLineColorRGBA,
HAnimSiteShape,
HAnimSiteViewpointLineColorRGBA,
HAnimSiteViewpointShape,
Original_WorldInfo,
SiteViewpointDiamondIFS
Index for Viewpoint images
:
Viewpoint_1,
Viewpoint_2,
Viewpoint_3,
Viewpoint_4,
Viewpoint_5,
Viewpoint_6,
Viewpoint_7,
Viewpoint_8,
Viewpoint_9,
hanim_back_viewpoint,
hanim_chest_front_close_viewpoint,
hanim_eye_level_viewpoint,
hanim_feet_front_close_viewpoint,
hanim_front_close_viewpoint,
hanim_front_viewpoint,
hanim_head_front_close_viewpoint,
hanim_knees_front_close_viewpoint,
hanim_l_eyeball_site_viewpoint,
hanim_l_hand_front_viewpoint,
hanim_l_inclined_viewpoint,
hanim_l_side_viewpoint,
hanim_pelvis_front_close_viewpoint,
hanim_r_eyeball_site_viewpoint,
hanim_r_hand_front_viewpoint,
hanim_r_inclined_viewpoint,
hanim_side_close_viewpoint,
hanim_Top_viewpoint
-->
<!--
=======================================================================================================
HAnimHumanoid skeleton holds X3D3 HAnim1 triplets, HAnimJoint (94) : HAnimSegment (94) : HAnimSite (109)
=======================================================================================================
HAnimHumanoid DEF='hanim_humanoid name='humanoid'
humanoid_root : sacrum
sacroiliac : pelvis : r_iliocristale_pt, r_trochanterion_pt, l_iliocristale_pt, l_trochanterion_pt, r_asis_pt, l_asis_pt, r_psis_pt, l_psis_pt, crotch_pt
| l_hip : l_thigh : l_knee_crease_pt, l_femoral_lateral_epicn_pt, l_femoral_medial_epicn_pt
| | l_knee : l_calf
| | l_ankle : l_hindfoot : l_lateral_malleolus_pt, l_medial_malleolus_pt, l_sphyrion_pt, l_calcaneous_post_pt
| | l_subtalar : l_midproximal
| | l_midtarsal : l_middistal : l_metatarsal_pha1_pt
| | l_metatarsal : l_forefoot : l_forefoot_tip, l_metatarsal_pha5_pt, l_digit2_pt
| r_hip : r_thigh : r_knee_crease_pt, r_femoral_lateral_epicn_pt, r_femoral_medial_epicn_pt
| r_knee : r_calf
| r_ankle : r_hindfoot : r_lateral_malleolus_pt, r_medial_malleolus_pt, r_sphyrion_pt, r_calcaneous_post_pt
| r_subtalar : r_midproximal
| r_midtarsal : r_middistal : r_metatarsal_pha1_pt
| r_metatarsal : r_forefoot : r_forefoot_tip, r_metatarsal_pha5_pt, r_digit2_pt
vl5 : l5 : waist_preferred_post_pt, navel_pt
vl4 : l4
vl3 : l3
vl2 : l2 : r_rib10_pt, l_rib10_pt, rib10_midspine_pt
vl1 : l1
vt12 : t12
vt11 : t11
vt10 : t10 : substernale_pt
vt9 : t9 : r_thelion_pt, l_thelion_pt
vt8 : t8
vt7 : t7
vt6 : t6
vt5 : t5
vt4 : t4
vt3 : t3
vt2 : t2
vt1 : t1 : suprasternale_pt, cervicale_pt
vc7 : c7 : r_neck_base_pt, l_neck_base_pt
| vc6 : c6
| vc5 : c5
| vc4 : c4
| vc3 : c3
| vc2 : c2
| vc1 : c1
| skullbase : skull : skull_tip, sellion_pt, r_infraorbitale_pt, l_infraorbitale_pt, supramenton_pt, r_tragion_pt, r_gonion_pt, l_tragion_pt, l_gonion_pt, nuchale_pt
| l_eyeball_joint : l_eyeball : l_eyeball_site_view
| l_eyelid_joint : l_eyelid
| l_eyebrow_joint : l_eyebrow
| r_eyeball_joint : r_eyeball : r_eyeball_site_view
| r_eyelid_joint : r_eyelid
| r_eyebrow_joint : r_eyebrow
| temporomandibular : jaw : temporomandibular_l_site_pt, temporomandibular_r_site_pt
l_sternoclavicular : l_clavicle : l_clavicale_pt, l_acromion_pt, l_axilla_ant_pt, l_axilla_post_pt
| l_acromioclavicular : l_scapula
| l_shoulder : l_upperarm : l_humeral_lateral_epicn_pt
| l_elbow : l_forearm : l_radial_styloid_pt, l_olecranon_pt, l_humeral_medial_epicn_pt, l_radiale_pt
| l_wrist : l_hand : l_metacarpal_pha2_pt, l_ulnar_styloid_pt, l_metacarpal_pha5_pt, l_hand_front_view
| l_thumb1 : l_thumb_metacarpal
| | l_thumb2 : l_thumb_proximal
| | l_thumb3 : l_thumb_distal : l_thumb_distal_tip
| l_index0 : l_index_metacarpal
| | l_index1 : l_index_proximal
| | l_index2 : l_index_middle
| | l_index3 : l_index_distal : l_index_distal_tip, l_dactylion_pt
| l_middle0 : l_middle_metacarpal
| | l_middle1 : l_middle_proximal
| | l_middle2 : l_middle_middle
| | l_middle3 : l_middle_distal : l_middle_distal_tip
| l_ring0 : l_ring_metacarpal
| | l_ring1 : l_ring_proximal
| | l_ring2 : l_ring_middle
| | l_ring3 : l_ring_distal : l_ring_distal_tip
| l_pinky0 : l_pinky_metacarpal
| l_pinky1 : l_pinky_proximal
| l_pinky2 : l_pinky_middle
| l_pinky3 : l_pinky_distal : l_pinky_distal_tip
r_sternoclavicular : r_clavicle : r_clavicale_pt, r_acromion_pt, r_axilla_ant_pt, r_axilla_post_pt
r_acromioclavicular : r_scapula
r_shoulder : r_upperarm : r_humeral_lateral_epicn_pt
r_elbow : r_forearm : r_radial_styloid_pt, r_olecranon_pt, r_humeral_medial_epicn_pt, r_radiale_pt
r_wrist : r_hand : r_metacarpal_pha2_pt, r_ulnar_styloid_pt, r_metacarpal_pha5_pt, r_hand_front_view
r_thumb1 : r_thumb_metacarpal
| r_thumb2 : r_thumb_proximal
| r_thumb3 : r_thumb_distal : r_thumb_distal_tip
r_index0 : r_index_metacarpal
| r_index1 : r_index_proximal
| r_index2 : r_index_middle
| r_index3 : r_index_distal : r_index_distal_tip, r_dactylion_pt
r_middle0 : r_middle_metacarpal
| r_middle1 : r_middle_proximal
| r_middle2 : r_middle_middle
| r_middle3 : r_middle_distal : r_middle_distal_tip
r_ring0 : r_ring_metacarpal
| r_ring1 : r_ring_proximal
| r_ring2 : r_ring_middle
| r_ring3 : r_ring_distal : r_ring_distal_tip
r_pinky0 : r_pinky_metacarpal
r_pinky1 : r_pinky_proximal
r_pinky2 : r_pinky_middle
r_pinky3 : r_pinky_distal : r_pinky_distal_tip
=======================================================================================================
The following inset decorates the original HAnimHumanoid skeleton with additional visualization shapes.
Authors can copy/paste this version to assist in visually diagnosing skeleton correctness.
Key to author-assist additions inserted in the HAnimHumanoid skeleton:
-
HumanoidRoot Suggested Shape geometry for HAnimHumanoid
-
HAnimJoint Suggested Shape geometry additions are provided to illustrate each HAnimJoint
-
HAnimSegment Suggested IndexedLineSet connections illustrate each HAnimSegment
-
HAnimSite Suggested IndexedLineSet and Shape geometry additions illustrate each HAnimSite
-
Viewpoint Suggested Shape geometry additions illustrate each HAnimSite/Viewpoint combinations
| <HAnimHumanoid
DEF='hanim_humanoid' name='humanoid' version ='1.0'
|
|
info='
|
"authorName=Matthew T. Beitler Joe D. Williams Don Brutzman"
"authorEmail=HAnim@web3D.org"
"copyright=none"
"creationDate=12 May 1999"
"usageRestrictions=none"
"humanoidVersion=2.0"
"height=1.7504"
'>
|
- <HAnimJoint
DEF='hanim_humanoid_root' name='humanoid_root' center ='0 0.824 0.0277' containerField ='skeleton' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_sacrum' name='sacrum'>
- <Transform
translation='0 0.824 0.0277'> <Shape
DEF=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
<Coordinate point='0 0.824 0.0277 0 0.9149 0.0016'/>
<ColorRGBA DEF='HAnimSegmentLineColorRGBA' color='1 1 0 1 1 1 0 0.1'/>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_sacroiliac' name='sacroiliac' center ='0 0.9149 0.0016' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_pelvis' name='pelvis'>
- <Transform
translation='0 0.9149 0.0016'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
<Coordinate point='0 0.9149 0.0016 -0.1525 1.0628 0.0035'/>
<ColorRGBA DEF='HAnimSiteLineColorRGBA' color='1 0 0 1 1 0 0 0.1'/>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_iliocristale_pt' name='r_iliocristale_pt_pt' translation='-0.1525 1.0628 0.0035'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_iliocristale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_iliocristale'/>
<Shape DEF='HAnimSiteShape' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<IndexedFaceSet DEF='DiamondIFS' creaseAngle='0.5' solid='false' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'>
<Coordinate point='0 0.008 0 -0.008 0 0 0 0 0.008 0.008 0 0 0 0 -0.008 0 -0.008 0'/>
</IndexedFaceSet>
<Appearance>
<Material diffuseColor='1 0 0'/>
</Appearance>
</Shape>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_trochanterion_pt' name='r_trochanterion_pt_pt' translation='-0.1689 0.8419 0.0352'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_trochanterion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_trochanterion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_iliocristale_pt' name='l_iliocristale_pt_pt' translation='0.1612 1.0537 0.0008'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_iliocristale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_iliocristale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_trochanterion_pt' name='l_trochanterion_pt_pt' translation='0.1677 0.8336 0.0303'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_trochanterion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_trochanterion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_asis_pt' name='r_asis_pt_pt' translation='-0.0887 1.0021 0.1112'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_asis_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_asis'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_asis_pt' name='l_asis_pt_pt' translation='0.0925 0.9983 0.1052'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_asis_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_asis'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_psis_pt' name='r_psis_pt_pt' translation='-0.0716 1.019 -0.1138'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_psis_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_psis'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_psis_pt' name='l_psis_pt_pt' translation='0.0774 1.019 -0.1151'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_psis_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_psis'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_crotch_pt' name='crotch_pt_pt' translation='0.0034 0.8266 0.0257'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite crotch_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite crotch'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_hip' name='l_hip' center ='0.0961 0.9124 -0.0001' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_thigh' name='l_thigh'>
- <Transform
translation='0.0961 0.9124 -0.0001'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_knee_crease_pt' name='l_knee_crease_pt_pt' translation='0.0993 0.4881 -0.0309'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_knee_crease_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_knee_crease'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_femoral_lateral_epicn_pt' name='l_femoral_lateral_epicn_pt_pt' translation='0.1598 0.4967 0.0297'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_femoral_lateral_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_femoral_lateral_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_femoral_medial_epicn_pt' name='l_femoral_medial_epicn_pt_pt' translation='0.0398 0.4946 0.0303'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_femoral_medial_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_femoral_medial_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_knee' name='l_knee' center ='0.104 0.4867 0.0308' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_calf' name='l_calf'>
- <Transform
translation='0.104 0.4867 0.0308'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_ankle' name='l_ankle' center ='0.1101 0.0656 -0.0736' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_hindfoot' name='l_hindfoot'>
- <Transform
translation='0.1101 0.0656 -0.0736'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_lateral_malleolus_pt' name='l_lateral_malleolus_pt_pt' translation='0.1308 0.0597 -0.1032'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_lateral_malleolus_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_lateral_malleolus'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_medial_malleolus_pt' name='l_medial_malleolus_pt_pt' translation='0.089 0.0716 -0.0881'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_medial_malleolus_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_medial_malleolus'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_sphyrion_pt' name='l_sphyrion_pt_pt' translation='0.089 0.0575 -0.0943'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_sphyrion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_sphyrion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_calcaneous_post_pt' name='l_calcaneous_post_pt_pt' translation='0.0974 0.0259 -0.1171'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_calcaneous_post_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_calcaneous_post'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_subtalar' name='l_subtalar' center ='0.1086 0.0001 -0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_midproximal' name='l_midproximal'>
- <Transform
translation='0.1086 0.0001 -0.0368'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_midtarsal' name='l_midtarsal' center ='0.1086 0.0001 0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_middistal' name='l_middistal'>
- <Transform
translation='0.1086 0.0001 0.0368'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_metatarsal_pha1_pt' name='l_metatarsal_pha1_pt_pt' translation='0.0816 0.0232 0.0106'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_metatarsal_pha1_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_metatarsal_pha1'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_metatarsal' name='l_metatarsal' center ='0.1086 0 0.0762' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_forefoot' name='l_forefoot'>
- <Transform
translation='0.1086 0 0.0762'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_forefoot_tip' name='l_forefoot_tip_pt' translation='0.1354 0.0016 0.1476'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_forefoot_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_forefoot_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_metatarsal_pha5_pt' name='l_metatarsal_pha5_pt_pt' translation='0.1825 0.007 0.0928'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_metatarsal_pha5_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_metatarsal_pha5'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_digit2_pt' name='l_digit2_pt_pt' translation='0.1195 0.0079 0.1433'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_digit2_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_digit2'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_hip' name='r_hip' center ='-0.0961 0.9124 -0.0001' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_thigh' name='r_thigh'>
- <Transform
translation='-0.0961 0.9124 -0.0001'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_knee_crease_pt' name='r_knee_crease_pt_pt' translation='-0.0825 0.4932 -0.0326'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_knee_crease_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_knee_crease'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_femoral_lateral_epicn_pt' name='r_femoral_lateral_epicn_pt_pt' translation='-0.1421 0.4992 0.031'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_femoral_lateral_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_femoral_lateral_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_femoral_medial_epicn_pt' name='r_femoral_medial_epicn_pt_pt' translation='-0.0221 0.5014 0.0289'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_femoral_medial_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_femoral_medial_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_knee' name='r_knee' center ='-0.104 0.4867 0.0308' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_calf' name='r_calf'>
- <Transform
translation='-0.104 0.4867 0.0308'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_ankle' name='r_ankle' center ='-0.1101 0.0656 -0.0736' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_hindfoot' name='r_hindfoot'>
- <Transform
translation='-0.1101 0.0656 -0.0736'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_lateral_malleolus_pt' name='r_lateral_malleolus_pt_pt' translation='-0.1006 0.0658 -0.1075'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_lateral_malleolus_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_lateral_malleolus'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_medial_malleolus_pt' name='r_medial_malleolus_pt_pt' translation='-0.0591 0.076 -0.0928'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_medial_malleolus_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_medial_malleolus'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_sphyrion_pt' name='r_sphyrion_pt_pt' translation='-0.0603 0.061 -0.1002'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_sphyrion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_sphyrion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_calcaneous_post_pt' name='r_calcaneous_post_pt_pt' translation='-0.0692 0.0297 -0.1221'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_calcaneous_post_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_calcaneous_post'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_subtalar' name='r_subtalar' center ='-0.1086 0.0001 -0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_midproximal' name='r_midproximal'>
- <Transform
translation='-0.1086 0.0001 -0.0368'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_midtarsal' name='r_midtarsal' center ='-0.1086 0.0001 0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_middistal' name='r_middistal'>
- <Transform
translation='-0.1086 0.0001 0.0368'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_metatarsal_pha1_pt' name='r_metatarsal_pha1_pt_pt' translation='-0.0521 0.026 0.0127'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_metatarsal_pha1_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_metatarsal_pha1'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_metatarsal' name='r_metatarsal' center ='-0.1086 0 0.0762' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_forefoot' name='r_forefoot'>
- <Transform
translation='-0.1086 0 0.0762'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_forefoot_tip' name='r_forefoot_tip_pt' translation='-0.1043 0.0227 0.145'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_forefoot_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_forefoot_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_metatarsal_pha5_pt' name='r_metatarsal_pha5_pt_pt' translation='-0.1523 0.0166 0.0895'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_metatarsal_pha5_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_metatarsal_pha5'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_digit2_pt' name='r_digit2_pt_pt' translation='-0.0883 0.0134 0.1383'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_digit2_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_digit2'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_vl5' name='vl5' center ='0.0028 1.0568 -0.0776' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l5' name='l5'>
- <Transform
translation='0.0028 1.0568 -0.0776'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_waist_preferred_post_pt' name='waist_preferred_post_pt_pt' translation='0 1.0915 -0.1091'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite waist_preferred_post_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite waist_preferred_post'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_navel_pt' name='navel_pt_pt' translation='0.0069 1.0966 0.1017'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite navel_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite navel'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vl4' name='vl4' center ='0.0035 1.0925 -0.0787' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l4' name='l4'>
- <Transform
translation='0.0035 1.0925 -0.0787'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vl3' name='vl3' center ='0.0041 1.1276 -0.0796' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l3' name='l3'>
- <Transform
translation='0.0041 1.1276 -0.0796'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vl2' name='vl2' center ='0.0045 1.1546 -0.08' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l2' name='l2'>
- <Transform
translation='0.0045 1.1546 -0.08'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_rib10_pt' name='r_rib10_pt_pt' translation='-0.0711 1.1941 0.1016'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_rib10_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_rib10'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_rib10_pt' name='l_rib10_pt_pt' translation='0.0871 1.1925 0.0992'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_rib10_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_rib10'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_rib10_midspine_pt' name='rib10_midspine_pt_pt' translation='0.0049 1.1908 -0.1113'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite rib10_midspine_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite rib10_midspine'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vl1' name='vl1' center ='0.0048 1.1912 -0.0805' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l1' name='l1'>
- <Transform
translation='0.0048 1.1912 -0.0805'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt12' name='vt12' center ='0.0051 1.2278 -0.0808' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t12' name='t12'>
- <Transform
translation='0.0051 1.2278 -0.0808'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt11' name='vt11' center ='0.0053 1.2679 -0.081' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t11' name='t11'>
- <Transform
translation='0.0053 1.2679 -0.081'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt10' name='vt10' center ='0.0056 1.2848 -0.0822' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t10' name='t10'>
- <Transform
translation='0.0056 1.2848 -0.0822'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_substernale_pt' name='substernale_pt_pt' translation='0.0085 1.2995 0.1147'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite substernale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite substernale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt9' name='vt9' center ='0.0057 1.3126 -0.0838' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t9' name='t9'>
- <Transform
translation='0.0057 1.3126 -0.0838'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_thelion_pt' name='r_thelion_pt_pt' translation='-0.0736 1.3385 0.1217'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_thelion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_thelion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_thelion_pt' name='l_thelion_pt_pt' translation='0.0918 1.3382 0.1192'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_thelion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_thelion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt8' name='vt8' center ='0.0057 1.3382 -0.0845' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t8' name='t8'>
- <Transform
translation='0.0057 1.3382 -0.0845'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt7' name='vt7' center ='0.0058 1.3625 -0.0833' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t7' name='t7'>
- <Transform
translation='0.0058 1.3625 -0.0833'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt6' name='vt6' center ='0.0059 1.3866 -0.08' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t6' name='t6'>
- <Transform
translation='0.0059 1.3866 -0.08'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt5' name='vt5' center ='0.006 1.4102 -0.0745' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t5' name='t5'>
- <Transform
translation='0.006 1.4102 -0.0745'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt4' name='vt4' center ='0.0061 1.432 -0.0675' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t4' name='t4'>
- <Transform
translation='0.0061 1.432 -0.0675'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt3' name='vt3' center ='0.0062 1.4583 -0.057' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t3' name='t3'>
- <Transform
translation='0.0062 1.4583 -0.057'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt2' name='vt2' center ='0.0063 1.4761 -0.0484' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t2' name='t2'>
- <Transform
translation='0.0063 1.4761 -0.0484'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt1' name='vt1' center ='0.0065 1.4951 -0.0387' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t1' name='t1'>
- <Transform
translation='0.0065 1.4951 -0.0387'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_suprasternale_pt' name='suprasternale_pt_pt' translation='0.0084 1.4714 0.0551'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite suprasternale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite suprasternale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_cervicale_pt' name='cervicale_pt_pt' translation='0.0064 1.52 -0.0815'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite cervicale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite cervicale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc7' name='vc7' center ='0.0066 1.5132 -0.0301' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c7' name='c7'>
- <Transform
translation='0.0066 1.5132 -0.0301'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_neck_base_pt' name='r_neck_base_pt_pt' translation='-0.0419 1.5149 -0.022'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_neck_base_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_neck_base'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_neck_base_pt' name='l_neck_base_pt_pt' translation='0.0646 1.5141 -0.038'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_neck_base_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_neck_base'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc6' name='vc6' center ='0.0066 1.5357 -0.0143' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c6' name='c6'>
- <Transform
translation='0.0066 1.5357 -0.0143'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc5' name='vc5' center ='0.0066 1.552 -0.0082' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c5' name='c5'>
- <Transform
translation='0.0066 1.552 -0.0082'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc4' name='vc4' center ='0.0066 1.5662 -0.0084' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c4' name='c4'>
- <Transform
translation='0.0066 1.5662 -0.0084'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc3' name='vc3' center ='0.0066 1.58 -0.0103' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c3' name='c3'>
- <Transform
translation='0.0066 1.58 -0.0103'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc2' name='vc2' center ='0.0066 1.5928 -0.0103' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c2' name='c2'>
- <Transform
translation='0.0066 1.5928 -0.0103'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc1' name='vc1' center ='0.0066 1.6144 -0.0034' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c1' name='c1'>
- <Transform
translation='0.0066 1.6144 -0.0034'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_skullbase' name='skullbase' center ='0.0044 1.6209 0.0236' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_skull' name='skull'>
- <Transform
translation='0.0044 1.6209 0.0236'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_skull_tip' name='skull_tip_pt' translation='0.005 1.7504 0.0055'>
-
<!-- TODO move skull_tip x to zero, check others for symmetry -->
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite skull_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite skull_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_sellion_pt' name='sellion_pt_pt' translation='0.0058 1.6316 0.0852'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite sellion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite sellion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_infraorbitale_pt' name='r_infraorbitale_pt_pt' translation='-0.0237 1.6171 0.0752'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_infraorbitale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_infraorbitale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_infraorbitale_pt' name='l_infraorbitale_pt_pt' translation='0.0341 1.6171 0.0752'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_infraorbitale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_infraorbitale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_supramenton_pt' name='supramenton_pt_pt' translation='0.0061 1.541 0.0805'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite supramenton_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite supramenton'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_tragion_pt' name='r_tragion_pt_pt' translation='-0.0646 1.6347 0.0302'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_tragion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_tragion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_gonion_pt' name='r_gonion_pt_pt' translation='-0.052 1.5529 0.0347'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_gonion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_gonion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_tragion_pt' name='l_tragion_pt_pt' translation='0.0739 1.6348 0.0282'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_tragion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_tragion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_gonion_pt' name='l_gonion_pt_pt' translation='0.0631 1.553 0.033'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_gonion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_gonion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_nuchale_pt' name='nuchale_pt_pt' translation='0.0039 1.5972 -0.0796'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite nuchale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite nuchale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_eyeball_joint' name='l_eyeball_joint' center ='0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_eyeball' name='l_eyeball'>
- <Transform
translation='0.0336 1.6332 0.0502'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
<Coordinate point='0.0336 1.6332 0.0502 0.034 1.64 0.05'/>
<ColorRGBA DEF='HAnimSiteViewpointLineColorRGBA' color='0 0 1 1 0 0 1 0.1'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_eyeball_site_view' name='l_eyeball_site_view_pt' translation='0.034 1.64 0.05'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_eyeball_site_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite l_eyeball_site_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_l_eyeball_site_viewpoint' description='l_eyeball_site_viewpoint looking forward' orientation='0 1 0 3.141593' position='0 0 0'/>
<Anchor description='HAnimSite hanim_l_eyeball_site_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_l_eyeball_site_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<WorldInfo info='"hide diamond when close"'/>
<Shape DEF='HAnimSiteViewpointShape' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<IndexedFaceSet DEF='SiteViewpointDiamondIFS' creaseAngle='0.5' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'>
<Coordinate point='0 0.010 0 -0.010 0 0 0 0 0.010 0.010 0 0 0 0 -0.010 0 -0.010 0'/>
</IndexedFaceSet>
<Appearance>
<Material diffuseColor='0 0 1' transparency='0.6'/>
</Appearance>
</Shape>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_l_eyeball_site_view Viewpoint ' url='"#hanim_l_eyeball_site_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_eyelid_joint' name='l_eyelid_joint' center ='0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_eyelid' name='l_eyelid'>
- <Transform
translation='0.0336 1.6332 0.0502'> <Shape
USE=''/> </Transform>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_eyebrow_joint' name='l_eyebrow_joint' center ='0.0336 1.635 0.0506' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_eyebrow' name='l_eyebrow'>
- <Transform
translation='0.0336 1.635 0.0506'> <Shape
USE=''/> </Transform>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_eyeball_joint' name='r_eyeball_joint' center ='-0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_eyeball' name='r_eyeball'>
- <Transform
translation='-0.0336 1.6332 0.0502'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_eyeball_site_view' name='r_eyeball_site_view_pt' translation='-0.034 1.64 0.05'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_eyeball_site_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite r_eyeball_site_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_r_eyeball_site_viewpoint' description='r_eyeball_site_viewpoint looking forward' orientation='0 1 0 3.141593' position='0 0 0'/>
<Anchor description='HAnimSite hanim_r_eyeball_site_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_r_eyeball_site_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_r_eyeball_site_view Viewpoint ' url='"#hanim_r_eyeball_site_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_eyelid_joint' name='r_eyelid_joint' center ='-0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_eyelid' name='r_eyelid'>
- <Transform
translation='-0.0336 1.6332 0.0502'> <Shape
USE=''/> </Transform>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_eyebrow_joint' name='r_eyebrow_joint' center ='-0.0336 1.635 0.0506' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_eyebrow' name='r_eyebrow'>
- <Transform
translation='-0.0336 1.635 0.0506'> <Shape
USE=''/> </Transform>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_temporomandibular' name='temporomandibular' center ='0.0 1.63 0.015' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- Single joint, single segment for jaw, two sites for left/right TMJs https://en.wikipedia.org/wiki/Temporomandibular_joint -->
- <HAnimSegment
DEF='hanim_jaw' name='jaw'>
- <Transform
translation='0.0 1.63 0.015'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_temporomandibular_l_site_pt' name='temporomandibular_l_site_pt_pt' translation='0.045 1.63 0.0'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite temporomandibular_l_site_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite temporomandibular_l_site'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_temporomandibular_r_site_pt' name='temporomandibular_r_site_pt_pt' translation='-0.045 1.63 0.0'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite temporomandibular_r_site_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite temporomandibular_r_site'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_sternoclavicular' name='l_sternoclavicular' center ='0.082 1.4488 -0.0353' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_clavicle' name='l_clavicle'>
- <Transform
translation='0.082 1.4488 -0.0353'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_clavicale_pt' name='l_clavicale_pt_pt' translation='0.0271 1.4943 0.0394'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_clavicale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_clavicale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_acromion_pt' name='l_acromion_pt_pt' translation='0.2032 1.476 -0.049'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_acromion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_acromion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_axilla_ant_pt' name='l_axilla_ant_pt_pt' translation='0.1777 1.4065 -0.0075'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_axilla_ant_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_axilla_ant'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_axilla_post_pt' name='l_axilla_post_pt_pt' translation='0.1706 1.4072 -0.0875'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_axilla_post_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_axilla_post'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_acromioclavicular' name='l_acromioclavicular' center ='0.0962 1.4269 -0.0424' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_scapula' name='l_scapula'>
- <Transform
translation='0.0962 1.4269 -0.0424'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_shoulder' name='l_shoulder' center ='0.2029 1.4376 -0.0387' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_upperarm' name='l_upperarm'>
- <Transform
translation='0.2029 1.4376 -0.0387'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_humeral_lateral_epicn_pt' name='l_humeral_lateral_epicn_pt_pt' translation='0.228 1.1482 -0.11'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_humeral_lateral_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_humeral_lateral_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_elbow' name='l_elbow' center ='0.2014 1.1357 -0.0682' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_forearm' name='l_forearm'>
- <Transform
translation='0.2014 1.1357 -0.0682'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_radial_styloid_pt' name='l_radial_styloid_pt_pt' translation='0.1901 0.8645 -0.0415'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_radial_styloid_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_radial_styloid'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_olecranon_pt' name='l_olecranon_pt_pt' translation='0.1962 1.1375 -0.1123'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_olecranon_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_olecranon'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_humeral_medial_epicn_pt' name='l_humeral_medial_epicn_pt_pt' translation='0.1735 1.1272 -0.1113'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_humeral_medial_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_humeral_medial_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_radiale_pt' name='l_radiale_pt_pt' translation='0.2182 1.1212 -0.1167'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_radiale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_radiale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_wrist' name='l_wrist' center ='0.1984 0.8663 -0.0583' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_hand' name='l_hand'>
- <Transform
translation='0.1984 0.8663 -0.0583'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_metacarpal_pha2_pt' name='l_metacarpal_pha2_pt_pt' translation='0.2009 0.8139 -0.0237'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_metacarpal_pha2_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_metacarpal_pha2'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_ulnar_styloid_pt' name='l_ulnar_styloid_pt_pt' translation='0.2142 0.8529 -0.0648'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_ulnar_styloid_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_ulnar_styloid'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_metacarpal_pha5_pt' name='l_metacarpal_pha5_pt_pt' translation='0.1929 0.786 -0.1122'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_metacarpal_pha5_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_metacarpal_pha5'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_hand_front_view' name='l_hand_front_view_pt' translation='0.3 0.75 0.45'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_hand_front_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite l_hand_front_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_l_hand_front_viewpoint' centerOfRotation='0 0.7 0' description='left hand front' position='0 0 0'/>
<Anchor description='HAnimSite hanim_l_hand_front_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_l_hand_front_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_l_hand_front_view Viewpoint ' url='"#hanim_l_hand_front_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_thumb1' name='l_thumb1' center ='0.1924 0.8472 -0.0534' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_thumb_metacarpal' name='l_thumb_metacarpal'>
- <Transform
translation='0.1924 0.8472 -0.0534'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_thumb2' name='l_thumb2' center ='0.1951 0.8226 0.0246' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_thumb_proximal' name='l_thumb_proximal'>
- <Transform
translation='0.1951 0.8226 0.0246'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_thumb3' name='l_thumb3' center ='0.1955 0.8159 0.0464' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_thumb_distal' name='l_thumb_distal'>
- <Transform
translation='0.1955 0.8159 0.0464'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_thumb_distal_tip' name='l_thumb_distal_tip_pt' translation='0.1982 0.8061 0.0759'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_thumb_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_thumb_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_index0' name='l_index0' center ='0.1983 0.8024 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_index_metacarpal' name='l_index_metacarpal'>
- <Transform
translation='0.1983 0.8024 -0.028'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_index1' name='l_index1' center ='0.1983 0.7815 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_index_proximal' name='l_index_proximal'>
- <Transform
translation='0.1983 0.7815 -0.028'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_index2' name='l_index2' center ='0.2017 0.7363 -0.0248' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_index_middle' name='l_index_middle'>
- <Transform
translation='0.2017 0.7363 -0.0248'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_index3' name='l_index3' center ='0.2028 0.7139 -0.0236' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_index_distal' name='l_index_distal'>
- <Transform
translation='0.2028 0.7139 -0.0236'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_index_distal_tip' name='l_index_distal_tip_pt' translation='0.2089 0.6858 -0.0245'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_index_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_index_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_dactylion_pt' name='l_dactylion_pt_pt' translation='0.2056 0.6743 -0.0482'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_dactylion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_dactylion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_middle0' name='l_middle0' center ='0.1987 0.8029 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_middle_metacarpal' name='l_middle_metacarpal'>
- <Transform
translation='0.1987 0.8029 -0.053'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_middle1' name='l_middle1' center ='0.1987 0.7818 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_middle_proximal' name='l_middle_proximal'>
- <Transform
translation='0.1987 0.7818 -0.053'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_middle2' name='l_middle2' center ='0.2013 0.7273 -0.0503' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_middle_middle' name='l_middle_middle'>
- <Transform
translation='0.2013 0.7273 -0.0503'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_middle3' name='l_middle3' center ='0.2026 0.7011 -0.0494' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_middle_distal' name='l_middle_distal'>
- <Transform
translation='0.2026 0.7011 -0.0494'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_middle_distal_tip' name='l_middle_distal_tip_pt' translation='0.208 0.6731 -0.0491'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_middle_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_middle_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_ring0' name='l_ring0' center ='0.1956 0.8019 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_ring_metacarpal' name='l_ring_metacarpal'>
- <Transform
translation='0.1956 0.8019 -0.0794'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_ring1' name='l_ring1' center ='0.1956 0.7815 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_ring_proximal' name='l_ring_proximal'>
- <Transform
translation='0.1956 0.7815 -0.0794'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_ring2' name='l_ring2' center ='0.1973 0.7287 -0.0777' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_ring_middle' name='l_ring_middle'>
- <Transform
translation='0.1973 0.7287 -0.0777'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_ring3' name='l_ring3' center ='0.1983 0.7045 -0.0767' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_ring_distal' name='l_ring_distal'>
- <Transform
translation='0.1983 0.7045 -0.0767'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_ring_distal_tip' name='l_ring_distal_tip_pt' translation='0.2035 0.675 -0.0756'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_ring_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_ring_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_pinky0' name='l_pinky0' center ='0.1925 0.8066 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_pinky_metacarpal' name='l_pinky_metacarpal'>
- <Transform
translation='0.1925 0.8066 -0.1036'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_pinky1' name='l_pinky1' center ='0.1925 0.7866 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_pinky_proximal' name='l_pinky_proximal'>
- <Transform
translation='0.1925 0.7866 -0.1036'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_pinky2' name='l_pinky2' center ='0.1938 0.7452 -0.1024' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_pinky_middle' name='l_pinky_middle'>
- <Transform
translation='0.1938 0.7452 -0.1024'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_pinky3' name='l_pinky3' center ='0.1948 0.7277 -0.1017' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_pinky_distal' name='l_pinky_distal'>
- <Transform
translation='0.1948 0.7277 -0.1017'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_pinky_distal_tip' name='l_pinky_distal_tip_pt' translation='0.2014 0.7009 -0.1012'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_pinky_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite l_pinky_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_sternoclavicular' name='r_sternoclavicular' center ='-0.082 1.4488 -0.0353' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_clavicle' name='r_clavicle'>
- <Transform
translation='-0.082 1.4488 -0.0353'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_clavicale_pt' name='r_clavicale_pt_pt' translation='-0.0115 1.4943 0.04'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_clavicale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_clavicale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_acromion_pt' name='r_acromion_pt_pt' translation='-0.1905 1.4791 -0.0431'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_acromion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_acromion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_axilla_ant_pt' name='r_axilla_ant_pt_pt' translation='-0.1626 1.4072 -0.0031'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_axilla_ant_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_axilla_ant'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_axilla_post_pt' name='r_axilla_post_pt_pt' translation='-0.1603 1.4098 -0.0826'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_axilla_post_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_axilla_post'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_acromioclavicular' name='r_acromioclavicular' center ='-0.0962 1.4269 -0.0424' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_scapula' name='r_scapula'>
- <Transform
translation='-0.0962 1.4269 -0.0424'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_shoulder' name='r_shoulder' center ='-0.2029 1.4376 -0.0387' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_upperarm' name='r_upperarm'>
- <Transform
translation='-0.2029 1.4376 -0.0387'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_humeral_lateral_epicn_pt' name='r_humeral_lateral_epicn_pt_pt' translation='-0.2224 1.1517 -0.1033'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_humeral_lateral_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_humeral_lateral_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_elbow' name='r_elbow' center ='-0.2014 1.1357 -0.0682' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_forearm' name='r_forearm'>
- <Transform
translation='-0.2014 1.1357 -0.0682'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_radial_styloid_pt' name='r_radial_styloid_pt_pt' translation='-0.1884 0.8676 -0.036'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_radial_styloid_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_radial_styloid'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_olecranon_pt' name='r_olecranon_pt_pt' translation='-0.1907 1.1405 -0.1065'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_olecranon_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_olecranon'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_humeral_medial_epicn_pt' name='r_humeral_medial_epicn_pt_pt' translation='-0.168 1.1298 -0.1062'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_humeral_medial_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_humeral_medial_epicn'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_radiale_pt' name='r_radiale_pt_pt' translation='-0.213 1.1305 -0.1091'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_radiale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_radiale'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_wrist' name='r_wrist' center ='-0.1984 0.8663 -0.0583' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_hand' name='r_hand'>
- <Transform
translation='-0.1984 0.8663 -0.0583'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_metacarpal_pha2_pt' name='r_metacarpal_pha2_pt_pt' translation='-0.1977 0.8169 -0.0177'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_metacarpal_pha2_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_metacarpal_pha2'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_ulnar_styloid_pt' name='r_ulnar_styloid_pt_pt' translation='-0.2117 0.8562 -0.0584'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_ulnar_styloid_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_ulnar_styloid'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_metacarpal_pha5_pt' name='r_metacarpal_pha5_pt_pt' translation='-0.1929 0.789 -0.1064'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_metacarpal_pha5_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_metacarpal_pha5'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_hand_front_view' name='r_hand_front_view_pt' translation='-0.3 0.75 0.45'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_hand_front_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite r_hand_front_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_r_hand_front_viewpoint' centerOfRotation='0 0.7 0' description='right hand front' position='0 0 0'/>
<Anchor description='HAnimSite hanim_r_hand_front_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_r_hand_front_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_r_hand_front_view Viewpoint ' url='"#hanim_r_hand_front_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_thumb1' name='r_thumb1' center ='-0.1924 0.8472 -0.0534' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_thumb_metacarpal' name='r_thumb_metacarpal'>
- <Transform
translation='-0.1924 0.8472 -0.0534'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_thumb2' name='r_thumb2' center ='-0.1951 0.8226 0.0246' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_thumb_proximal' name='r_thumb_proximal'>
- <Transform
translation='-0.1951 0.8226 0.0246'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_thumb3' name='r_thumb3' center ='-0.1955 0.8159 0.0464' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_thumb_distal' name='r_thumb_distal'>
- <Transform
translation='-0.1955 0.8159 0.0464'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_thumb_distal_tip' name='r_thumb_distal_tip_pt' translation='-0.1869 0.809 0.082'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_thumb_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_thumb_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_index0' name='r_index0' center ='-0.1983 0.8024 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_index_metacarpal' name='r_index_metacarpal'>
- <Transform
translation='-0.1983 0.8024 -0.028'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_index1' name='r_index1' center ='-0.1983 0.7815 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_index_proximal' name='r_index_proximal'>
- <Transform
translation='-0.1983 0.7815 -0.028'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_index2' name='r_index2' center ='-0.2017 0.7363 -0.0248' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_index_middle' name='r_index_middle'>
- <Transform
translation='-0.2017 0.7363 -0.0248'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_index3' name='r_index3' center ='-0.2028 0.7139 -0.0236' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_index_distal' name='r_index_distal'>
- <Transform
translation='-0.2028 0.7139 -0.0236'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_index_distal_tip' name='r_index_distal_tip_pt' translation='-0.198 0.6883 -0.018'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_index_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_index_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_dactylion_pt' name='r_dactylion_pt_pt' translation='-0.1941 0.6772 -0.0423'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_dactylion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_dactylion'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_middle0' name='r_middle0' center ='-0.1987 0.8029 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_middle_metacarpal' name='r_middle_metacarpal'>
- <Transform
translation='-0.1987 0.8029 -0.053'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_middle1' name='r_middle1' center ='-0.1987 0.7818 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_middle_proximal' name='r_middle_proximal'>
- <Transform
translation='-0.1987 0.7818 -0.053'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_middle2' name='r_middle2' center ='-0.2013 0.7273 -0.0503' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_middle_middle' name='r_middle_middle'>
- <Transform
translation='-0.2013 0.7273 -0.0503'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_middle3' name='r_middle3' center ='-0.2026 0.7011 -0.0494' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_middle_distal' name='r_middle_distal'>
- <Transform
translation='-0.2026 0.7011 -0.0494'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_middle_distal_tip' name='r_middle_distal_tip_pt' translation='-0.1969 0.6758 -0.0427'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_middle_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_middle_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_ring0' name='r_ring0' center ='-0.1956 0.8019 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_ring_metacarpal' name='r_ring_metacarpal'>
- <Transform
translation='-0.1956 0.8019 -0.0794'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_ring1' name='r_ring1' center ='-0.1956 0.7815 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_ring_proximal' name='r_ring_proximal'>
- <Transform
translation='-0.1956 0.7815 -0.0794'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_ring2' name='r_ring2' center ='-0.1973 0.7287 -0.0777' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_ring_middle' name='r_ring_middle'>
- <Transform
translation='-0.1973 0.7287 -0.0777'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_ring3' name='r_ring3' center ='-0.1983 0.7045 -0.0767' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_ring_distal' name='r_ring_distal'>
- <Transform
translation='-0.1983 0.7045 -0.0767'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_ring_distal_tip' name='r_ring_distal_tip_pt' translation='-0.1934 0.6778 -0.0693'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_ring_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_ring_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_pinky0' name='r_pinky0' center ='-0.1925 0.8066 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_pinky_metacarpal' name='r_pinky_metacarpal'>
- <Transform
translation='-0.1925 0.8066 -0.1036'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_pinky1' name='r_pinky1' center ='-0.1925 0.7866 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_pinky_proximal' name='r_pinky_proximal'>
- <Transform
translation='-0.1925 0.7866 -0.1036'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_pinky2' name='r_pinky2' center ='-0.1938 0.7452 -0.1024' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_pinky_middle' name='r_pinky_middle'>
- <Transform
translation='-0.1938 0.7452 -0.1024'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_pinky3' name='r_pinky3' center ='-0.1948 0.7277 -0.1017' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_pinky_distal' name='r_pinky_distal'>
- <Transform
translation='-0.1948 0.7277 -0.1017'> <Shape
USE=''/> </Transform>
-
<Shape bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<LineSet vertexCount='2' containerField='geometry'>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_pinky_distal_tip' name='r_pinky_distal_tip_pt' translation='-0.1938 0.7035 -0.0949'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_pinky_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
<TouchSensor description='HAnimSite r_pinky_distal_tip'/>
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_l_inclined_view' name='l_inclined_view' containerField ='viewpoints' rotation='-0.113 0.993 0.0347 0.671' translation='1.62 1.05 2.06' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_inclined_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite l_inclined_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_l_inclined_viewpoint' description='left inclined' position='0 0 0'/>
<Anchor description='HAnimSite hanim_l_inclined_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_l_inclined_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_l_inclined_view Viewpoint ' url='"#hanim_l_inclined_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_r_inclined_view' name='r_inclined_view' containerField ='viewpoints' rotation='-0.113 -0.993 0.0347 0.671' translation='-1.62 1.05 2.06' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_inclined_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite r_inclined_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_r_inclined_viewpoint' centerOfRotation='0 0.9 0' description='right inclined' position='0 0 0'/>
<Anchor description='HAnimSite hanim_r_inclined_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_r_inclined_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_r_inclined_view Viewpoint ' url='"#hanim_r_inclined_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_front_view' name='front_view' containerField ='viewpoints' translation='0 0.85 2.58' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite front_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite front_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_front_viewpoint' centerOfRotation='0 0.9 0' description='front' position='0 0 0'/>
<Anchor description='HAnimSite hanim_front_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_front_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_front_view Viewpoint ' url='"#hanim_front_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_back_view' name='back_view' containerField ='viewpoints' rotation='0 1 0 3.14' translation='0 0.85 -2.58' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite back_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite back_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_back_viewpoint' centerOfRotation='0 0.9 0' description='back' position='0 0 0'/>
<Anchor description='HAnimSite hanim_back_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_back_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_back_view Viewpoint ' url='"#hanim_back_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_l_side_view' name='l_side_view' containerField ='viewpoints' rotation='0 1 0 1.5708' translation='2.6 0.854 0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_side_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite l_side_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_l_side_viewpoint' centerOfRotation='0 0.9 0' description='left side' position='0 0 0'/>
<Anchor description='HAnimSite hanim_l_side_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_l_side_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_l_side_view Viewpoint ' url='"#hanim_l_side_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_Top_view' name='Top_view' containerField ='viewpoints' rotation='1 0 0 -1.57' translation='0 3.5 0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite Top_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite Top_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_Top_viewpoint' centerOfRotation='0 0.9 0' description='Top' position='0 0 0'/>
<Anchor description='HAnimSite hanim_Top_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_Top_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_Top_view Viewpoint ' url='"#hanim_Top_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_front_close_view' name='front_close_view' containerField ='viewpoints' translation='0 0.854 1.575' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_front_close_viewpoint' centerOfRotation='0 0 1.575' description='front close' position='0 0 0'/>
<Anchor description='HAnimSite hanim_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_front_close_view Viewpoint ' url='"#hanim_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_side_close_view' name='side_close_view' containerField ='viewpoints' rotation='0 1 0 1.5708' translation='1.56 0.854 0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite side_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite side_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_side_close_viewpoint' centerOfRotation='1.6 0 0' description='side close' position='0 0 0'/>
<Anchor description='HAnimSite hanim_side_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_side_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_side_close_view Viewpoint ' url='"#hanim_side_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_head_front_close_view' name='head_front_close_view' containerField ='viewpoints' translation='0 1.5 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite head_front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite head_front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_head_front_close_viewpoint' centerOfRotation='0 0 1' description='head front close' position='0 0 0'/>
<Anchor description='HAnimSite hanim_head_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_head_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_head_front_close_view Viewpoint ' url='"#hanim_head_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_chest_front_close_view' name='chest_front_close_view' containerField ='viewpoints' translation='0 1.2 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite chest_front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite chest_front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_chest_front_close_viewpoint' centerOfRotation='0 0 1' description='chest front close' position='0 0 0'/>
<Anchor description='HAnimSite hanim_chest_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_chest_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_chest_front_close_view Viewpoint ' url='"#hanim_chest_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_pelvis_front_close_view' name='pelvis_front_close_view' containerField ='viewpoints' translation='0 0.8 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite pelvis_front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite pelvis_front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_pelvis_front_close_viewpoint' centerOfRotation='0 0 1' description='pelvis front close' position='0 0 0'/>
<Anchor description='HAnimSite hanim_pelvis_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_pelvis_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_pelvis_front_close_view Viewpoint ' url='"#hanim_pelvis_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_knees_front_close_view' name='knees_front_close_view' containerField ='viewpoints' translation='0 0.4 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite knees_front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite knees_front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_knees_front_close_viewpoint' centerOfRotation='0 0.4 0' description='knees front close' position='0 0 0'/>
<Anchor description='HAnimSite hanim_knees_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_knees_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_knees_front_close_view Viewpoint ' url='"#hanim_knees_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_feet_front_close_view' name='feet_front_close_view' containerField ='viewpoints' translation='0 0 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite feet_front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite feet_front_close_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_feet_front_close_viewpoint' description='feet front close' position='0 0 0'/>
<Anchor description='HAnimSite hanim_feet_front_close_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_feet_front_close_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_feet_front_close_view Viewpoint ' url='"#hanim_feet_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
<!-- right between the eyes, stationary position not animating except with body itself -->
- <HAnimSite
DEF='hanim_eye_level_view' name='eye_level_view' containerField ='viewpoints' translation='0 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite eye_level_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
-
<TouchSensor description='HAnimSite eye_level_view'/>
<Shape USE='HAnimSiteShape'/>
<Viewpoint DEF='hanim_eye_level_viewpoint' description='eye level looking forward' orientation='0 1 0 3.141593' position='0 0 0'/>
<Anchor description='HAnimSite hanim_eye_level_view Viewpoint' bboxCenter='0 0 0' bboxSize='-1 -1 -1'
url='
"#hanim_eye_level_viewpoint" '>
<LOD forceTransitions='true' range='0.04' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
</LOD>
</Anchor>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_eye_level_view Viewpoint ' url='"#hanim_eye_level_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- HAnimSite visualization shape -->
<!-- HAnimSite/Viewpoint visualization shape -->
|
|
</HAnimHumanoid>
|
-->
<!--
Color key:
<X3dNode
DEF='idName' field='value'/>
matches
<XmlElement
DEF='idName' attribute='value'/>
(Light blue background: behavior node) (Grey background: inserted documentation) (Magenta background: X3D Extensibility)
-->
<!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources and X3D Scene Authoring Hints.
-->
{kind=link}
{kind=link}
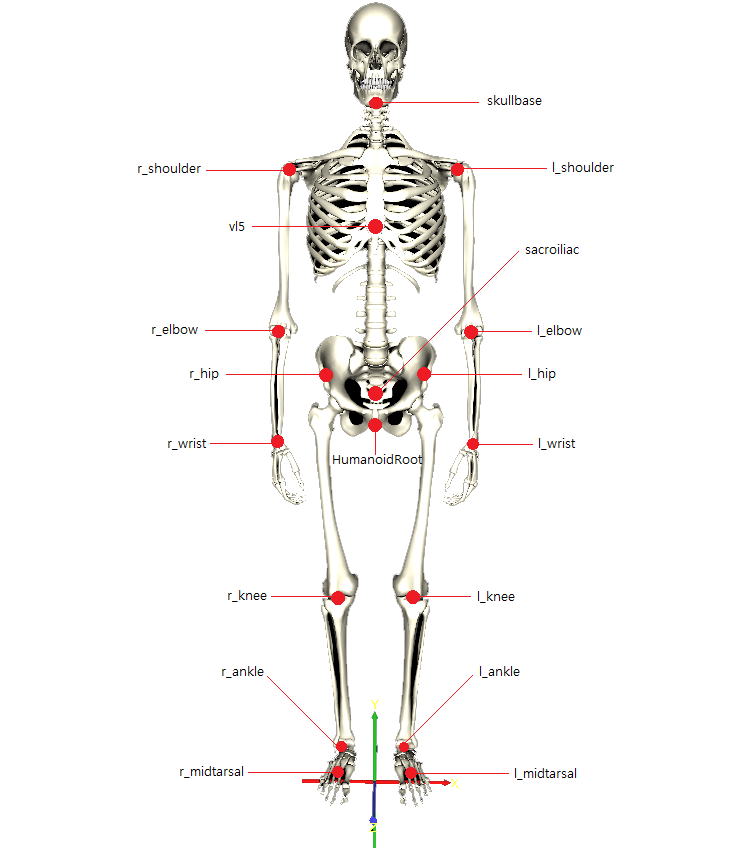{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}