- <HAnimJoint
DEF='hanim_humanoid_root' name='humanoid_root' center ='0 0.824 0.0277' containerField ='skeleton' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_sacrum' name='sacrum'>
-
<!-- Visualization sphere for <HAnimJoint name='humanoid_root'/> is placed within <HAnimSegment name='sacrum'/> -->
<TouchSensor description='HAnimJoint humanoid_root, HAnimSegment sacrum'/>
-
<Transform translation='0 0.824 0.0277'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='humanoid_root'/> to child <HAnimJoint name='sacroiliac'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.824 0.0277, 0 0.9149 0.0016'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='humanoid_root'/> to child <HAnimJoint name='vl5'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.824 0.0277, 0.0028 1.0568 -0.0776'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_sacroiliac' name='sacroiliac' center ='0 0.9149 0.0016' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_pelvis' name='pelvis'>
-
<!-- Visualization sphere for <HAnimJoint name='sacroiliac'/> is placed within <HAnimSegment name='pelvis'/> -->
<TouchSensor description='HAnimJoint sacroiliac, HAnimSegment pelvis'/>
-
<Transform translation='0 0.9149 0.0016'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='sacroiliac'/> to child <HAnimJoint name='l_hip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, 0.0961 0.9124 -0.0001'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='sacroiliac'/> to child <HAnimJoint name='r_hip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, -0.0961 0.9124 -0.0001'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_iliocristale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, -0.1525 1.0628 0.0035'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_trochanterion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, -0.1689 0.8419 0.0352'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_iliocristale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, 0.1612 1.0537 0.0008'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_trochanterion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, 0.1677 0.8336 0.0303'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_asis_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, -0.0887 1.0021 0.1112'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_asis_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, 0.0925 0.9983 0.1052'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_psis_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, -0.0716 1.019 -0.1138'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_psis_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, 0.0774 1.019 -0.1151'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='crotch_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0 0.9149 0.0016, 0.0034 0.8266 0.0257'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_iliocristale_pt' name='r_iliocristale_pt_pt' translation='-0.1525 1.0628 0.0035'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_iliocristale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_trochanterion_pt' name='r_trochanterion_pt_pt' translation='-0.1689 0.8419 0.0352'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_trochanterion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_iliocristale_pt' name='l_iliocristale_pt_pt' translation='0.1612 1.0537 0.0008'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_iliocristale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_trochanterion_pt' name='l_trochanterion_pt_pt' translation='0.1677 0.8336 0.0303'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_trochanterion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_asis_pt' name='r_asis_pt_pt' translation='-0.0887 1.0021 0.1112'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_asis_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_asis_pt' name='l_asis_pt_pt' translation='0.0925 0.9983 0.1052'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_asis_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_psis_pt' name='r_psis_pt_pt' translation='-0.0716 1.019 -0.1138'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_psis_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_psis_pt' name='l_psis_pt_pt' translation='0.0774 1.019 -0.1151'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_psis_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_crotch_pt' name='crotch_pt_pt' translation='0.0034 0.8266 0.0257'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite crotch_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_hip' name='l_hip' center ='0.0961 0.9124 -0.0001' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_thigh' name='l_thigh'>
-
<!-- Visualization sphere for <HAnimJoint name='l_hip'/> is placed within <HAnimSegment name='l_thigh'/> -->
<TouchSensor description='HAnimJoint l_hip, HAnimSegment l_thigh'/>
-
<Transform translation='0.0961 0.9124 -0.0001'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_hip'/> to child <HAnimJoint name='l_knee'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0961 0.9124 -0.0001, 0.104 0.4867 0.0308'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_knee_crease_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0961 0.9124 -0.0001, 0.0993 0.4881 -0.0309'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_femoral_lateral_epicn_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0961 0.9124 -0.0001, 0.1598 0.4967 0.0297'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_femoral_medial_epicn_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0961 0.9124 -0.0001, 0.0398 0.4946 0.0303'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_knee_crease_pt' name='l_knee_crease_pt_pt' translation='0.0993 0.4881 -0.0309'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_knee_crease_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_femoral_lateral_epicn_pt' name='l_femoral_lateral_epicn_pt_pt' translation='0.1598 0.4967 0.0297'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_femoral_lateral_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_femoral_medial_epicn_pt' name='l_femoral_medial_epicn_pt_pt' translation='0.0398 0.4946 0.0303'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_femoral_medial_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_knee' name='l_knee' center ='0.104 0.4867 0.0308' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_calf' name='l_calf'>
-
<!-- Visualization sphere for <HAnimJoint name='l_knee'/> is placed within <HAnimSegment name='l_calf'/> -->
<TouchSensor description='HAnimJoint l_knee, HAnimSegment l_calf'/>
-
<Transform translation='0.104 0.4867 0.0308'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_knee'/> to child <HAnimJoint name='l_ankle'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.104 0.4867 0.0308, 0.1101 0.0656 -0.0736'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_ankle' name='l_ankle' center ='0.1101 0.0656 -0.0736' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_hindfoot' name='l_hindfoot'>
-
<!-- Visualization sphere for <HAnimJoint name='l_ankle'/> is placed within <HAnimSegment name='l_hindfoot'/> -->
<TouchSensor description='HAnimJoint l_ankle, HAnimSegment l_hindfoot'/>
-
<Transform translation='0.1101 0.0656 -0.0736'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_ankle'/> to child <HAnimJoint name='l_subtalar'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1101 0.0656 -0.0736, 0.1086 0.0001 -0.0368'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_lateral_malleolus_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1101 0.0656 -0.0736, 0.1308 0.0597 -0.1032'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_medial_malleolus_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1101 0.0656 -0.0736, 0.089 0.0716 -0.0881'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_sphyrion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1101 0.0656 -0.0736, 0.089 0.0575 -0.0943'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_calcaneous_post_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1101 0.0656 -0.0736, 0.0974 0.0259 -0.1171'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_lateral_malleolus_pt' name='l_lateral_malleolus_pt_pt' translation='0.1308 0.0597 -0.1032'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_lateral_malleolus_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_medial_malleolus_pt' name='l_medial_malleolus_pt_pt' translation='0.089 0.0716 -0.0881'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_medial_malleolus_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_sphyrion_pt' name='l_sphyrion_pt_pt' translation='0.089 0.0575 -0.0943'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_sphyrion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_calcaneous_post_pt' name='l_calcaneous_post_pt_pt' translation='0.0974 0.0259 -0.1171'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_calcaneous_post_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_subtalar' name='l_subtalar' center ='0.1086 0.0001 -0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_midproximal' name='l_midproximal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_subtalar'/> is placed within <HAnimSegment name='l_midproximal'/> -->
<TouchSensor description='HAnimJoint l_subtalar, HAnimSegment l_midproximal'/>
-
<Transform translation='0.1086 0.0001 -0.0368'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_subtalar'/> to child <HAnimJoint name='l_midtarsal'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1086 0.0001 -0.0368, 0.1086 0.0001 0.0368'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_midtarsal' name='l_midtarsal' center ='0.1086 0.0001 0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_middistal' name='l_middistal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_midtarsal'/> is placed within <HAnimSegment name='l_middistal'/> -->
<TouchSensor description='HAnimJoint l_midtarsal, HAnimSegment l_middistal'/>
-
<Transform translation='0.1086 0.0001 0.0368'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_midtarsal'/> to child <HAnimJoint name='l_metatarsal'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1086 0.0001 0.0368, 0.1086 0 0.0762'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_midtarsal'/> to <HAnimSite name='l_metatarsal_pha1_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1086 0.0001 0.0368, 0.0816 0.0232 0.0106'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_metatarsal_pha1_pt' name='l_metatarsal_pha1_pt_pt' translation='0.0816 0.0232 0.0106'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_metatarsal_pha1_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_metatarsal' name='l_metatarsal' center ='0.1086 0 0.0762' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_forefoot' name='l_forefoot'>
-
<!-- Visualization sphere for <HAnimJoint name='l_metatarsal'/> is placed within <HAnimSegment name='l_forefoot'/> -->
<TouchSensor description='HAnimJoint l_metatarsal, HAnimSegment l_forefoot'/>
-
<Transform translation='0.1086 0 0.0762'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_forefoot_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1086 0 0.0762, 0.1354 0.0016 0.1476'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_metatarsal_pha5_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1086 0 0.0762, 0.1825 0.007 0.0928'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_digit2_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1086 0 0.0762, 0.1195 0.0079 0.1433'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_forefoot_tip' name='l_forefoot_tip_pt' translation='0.1354 0.0016 0.1476'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_forefoot_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_metatarsal_pha5_pt' name='l_metatarsal_pha5_pt_pt' translation='0.1825 0.007 0.0928'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_metatarsal_pha5_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_digit2_pt' name='l_digit2_pt_pt' translation='0.1195 0.0079 0.1433'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_digit2_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_hip' name='r_hip' center ='-0.0961 0.9124 -0.0001' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_thigh' name='r_thigh'>
-
<!-- Visualization sphere for <HAnimJoint name='r_hip'/> is placed within <HAnimSegment name='r_thigh'/> -->
<TouchSensor description='HAnimJoint r_hip, HAnimSegment r_thigh'/>
-
<Transform translation='-0.0961 0.9124 -0.0001'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_hip'/> to child <HAnimJoint name='r_knee'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.0961 0.9124 -0.0001, -0.104 0.4867 0.0308'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_knee_crease_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.0961 0.9124 -0.0001, -0.0825 0.4932 -0.0326'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_femoral_lateral_epicn_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.0961 0.9124 -0.0001, -0.1421 0.4992 0.031'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_femoral_medial_epicn_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.0961 0.9124 -0.0001, -0.0221 0.5014 0.0289'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_knee_crease_pt' name='r_knee_crease_pt_pt' translation='-0.0825 0.4932 -0.0326'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_knee_crease_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_femoral_lateral_epicn_pt' name='r_femoral_lateral_epicn_pt_pt' translation='-0.1421 0.4992 0.031'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_femoral_lateral_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_femoral_medial_epicn_pt' name='r_femoral_medial_epicn_pt_pt' translation='-0.0221 0.5014 0.0289'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_femoral_medial_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_knee' name='r_knee' center ='-0.104 0.4867 0.0308' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_calf' name='r_calf'>
-
<!-- Visualization sphere for <HAnimJoint name='r_knee'/> is placed within <HAnimSegment name='r_calf'/> -->
<TouchSensor description='HAnimJoint r_knee, HAnimSegment r_calf'/>
-
<Transform translation='-0.104 0.4867 0.0308'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_knee'/> to child <HAnimJoint name='r_ankle'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.104 0.4867 0.0308, -0.1101 0.0656 -0.0736'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_ankle' name='r_ankle' center ='-0.1101 0.0656 -0.0736' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_hindfoot' name='r_hindfoot'>
-
<!-- Visualization sphere for <HAnimJoint name='r_ankle'/> is placed within <HAnimSegment name='r_hindfoot'/> -->
<TouchSensor description='HAnimJoint r_ankle, HAnimSegment r_hindfoot'/>
-
<Transform translation='-0.1101 0.0656 -0.0736'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_ankle'/> to child <HAnimJoint name='r_subtalar'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1101 0.0656 -0.0736, -0.1086 0.0001 -0.0368'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_lateral_malleolus_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1101 0.0656 -0.0736, -0.1006 0.0658 -0.1075'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_medial_malleolus_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1101 0.0656 -0.0736, -0.0591 0.076 -0.0928'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_sphyrion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1101 0.0656 -0.0736, -0.0603 0.061 -0.1002'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_calcaneous_post_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1101 0.0656 -0.0736, -0.0692 0.0297 -0.1221'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_lateral_malleolus_pt' name='r_lateral_malleolus_pt_pt' translation='-0.1006 0.0658 -0.1075'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_lateral_malleolus_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_medial_malleolus_pt' name='r_medial_malleolus_pt_pt' translation='-0.0591 0.076 -0.0928'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_medial_malleolus_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_sphyrion_pt' name='r_sphyrion_pt_pt' translation='-0.0603 0.061 -0.1002'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_sphyrion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_calcaneous_post_pt' name='r_calcaneous_post_pt_pt' translation='-0.0692 0.0297 -0.1221'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_calcaneous_post_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_subtalar' name='r_subtalar' center ='-0.1086 0.0001 -0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_midproximal' name='r_midproximal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_subtalar'/> is placed within <HAnimSegment name='r_midproximal'/> -->
<TouchSensor description='HAnimJoint r_subtalar, HAnimSegment r_midproximal'/>
-
<Transform translation='-0.1086 0.0001 -0.0368'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_subtalar'/> to child <HAnimJoint name='r_midtarsal'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1086 0.0001 -0.0368, -0.1086 0.0001 0.0368'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_midtarsal' name='r_midtarsal' center ='-0.1086 0.0001 0.0368' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_middistal' name='r_middistal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_midtarsal'/> is placed within <HAnimSegment name='r_middistal'/> -->
<TouchSensor description='HAnimJoint r_midtarsal, HAnimSegment r_middistal'/>
-
<Transform translation='-0.1086 0.0001 0.0368'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_midtarsal'/> to child <HAnimJoint name='r_metatarsal'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1086 0.0001 0.0368, -0.1086 0 0.0762'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_midtarsal'/> to <HAnimSite name='r_metatarsal_pha1_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1086 0.0001 0.0368, -0.0521 0.026 0.0127'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_metatarsal_pha1_pt' name='r_metatarsal_pha1_pt_pt' translation='-0.0521 0.026 0.0127'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_metatarsal_pha1_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_metatarsal' name='r_metatarsal' center ='-0.1086 0 0.0762' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_forefoot' name='r_forefoot'>
-
<!-- Visualization sphere for <HAnimJoint name='r_metatarsal'/> is placed within <HAnimSegment name='r_forefoot'/> -->
<TouchSensor description='HAnimJoint r_metatarsal, HAnimSegment r_forefoot'/>
-
<Transform translation='-0.1086 0 0.0762'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_forefoot_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1086 0 0.0762, -0.1043 0.0227 0.145'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_metatarsal_pha5_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1086 0 0.0762, -0.1523 0.0166 0.0895'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_digit2_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1086 0 0.0762, -0.0883 0.0134 0.1383'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_forefoot_tip' name='r_forefoot_tip_pt' translation='-0.1043 0.0227 0.145'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_forefoot_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_metatarsal_pha5_pt' name='r_metatarsal_pha5_pt_pt' translation='-0.1523 0.0166 0.0895'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_metatarsal_pha5_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_digit2_pt' name='r_digit2_pt_pt' translation='-0.0883 0.0134 0.1383'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_digit2_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_vl5' name='vl5' center ='0.0028 1.0568 -0.0776' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l5' name='l5'>
-
<!-- Visualization sphere for <HAnimJoint name='vl5'/> is placed within <HAnimSegment name='l5'/> -->
<TouchSensor description='HAnimJoint vl5, HAnimSegment l5'/>
-
<Transform translation='0.0028 1.0568 -0.0776'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vl5'/> to child <HAnimJoint name='vl4'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0028 1.0568 -0.0776, 0.0035 1.0925 -0.0787'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl5'/> to <HAnimSite name='waist_preferred_post_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0028 1.0568 -0.0776, 0 1.0915 -0.1091'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl5'/> to <HAnimSite name='navel_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0028 1.0568 -0.0776, 0.0069 1.0966 0.1017'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_waist_preferred_post_pt' name='waist_preferred_post_pt_pt' translation='0 1.0915 -0.1091'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite waist_preferred_post_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_navel_pt' name='navel_pt_pt' translation='0.0069 1.0966 0.1017'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite navel_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vl4' name='vl4' center ='0.0035 1.0925 -0.0787' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l4' name='l4'>
-
<!-- Visualization sphere for <HAnimJoint name='vl4'/> is placed within <HAnimSegment name='l4'/> -->
<TouchSensor description='HAnimJoint vl4, HAnimSegment l4'/>
-
<Transform translation='0.0035 1.0925 -0.0787'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vl4'/> to child <HAnimJoint name='vl3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0035 1.0925 -0.0787, 0.0041 1.1276 -0.0796'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vl3' name='vl3' center ='0.0041 1.1276 -0.0796' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l3' name='l3'>
-
<!-- Visualization sphere for <HAnimJoint name='vl3'/> is placed within <HAnimSegment name='l3'/> -->
<TouchSensor description='HAnimJoint vl3, HAnimSegment l3'/>
-
<Transform translation='0.0041 1.1276 -0.0796'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vl3'/> to child <HAnimJoint name='vl2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0041 1.1276 -0.0796, 0.0045 1.1546 -0.08'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vl2' name='vl2' center ='0.0045 1.1546 -0.08' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l2' name='l2'>
-
<!-- Visualization sphere for <HAnimJoint name='vl2'/> is placed within <HAnimSegment name='l2'/> -->
<TouchSensor description='HAnimJoint vl2, HAnimSegment l2'/>
-
<Transform translation='0.0045 1.1546 -0.08'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vl2'/> to child <HAnimJoint name='vl1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0045 1.1546 -0.08, 0.0048 1.1912 -0.0805'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='r_rib10_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0045 1.1546 -0.08, -0.0711 1.1941 0.1016'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='l_rib10_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0045 1.1546 -0.08, 0.0871 1.1925 0.0992'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='rib10_midspine_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0045 1.1546 -0.08, 0.0049 1.1908 -0.1113'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_rib10_pt' name='r_rib10_pt_pt' translation='-0.0711 1.1941 0.1016'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_rib10_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_rib10_pt' name='l_rib10_pt_pt' translation='0.0871 1.1925 0.0992'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_rib10_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_rib10_midspine_pt' name='rib10_midspine_pt_pt' translation='0.0049 1.1908 -0.1113'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite rib10_midspine_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vl1' name='vl1' center ='0.0048 1.1912 -0.0805' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l1' name='l1'>
-
<!-- Visualization sphere for <HAnimJoint name='vl1'/> is placed within <HAnimSegment name='l1'/> -->
<TouchSensor description='HAnimJoint vl1, HAnimSegment l1'/>
-
<Transform translation='0.0048 1.1912 -0.0805'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vl1'/> to child <HAnimJoint name='vt12'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0048 1.1912 -0.0805, 0.0051 1.2278 -0.0808'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt12' name='vt12' center ='0.0051 1.2278 -0.0808' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t12' name='t12'>
-
<!-- Visualization sphere for <HAnimJoint name='vt12'/> is placed within <HAnimSegment name='t12'/> -->
<TouchSensor description='HAnimJoint vt12, HAnimSegment t12'/>
-
<Transform translation='0.0051 1.2278 -0.0808'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt12'/> to child <HAnimJoint name='vt11'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0051 1.2278 -0.0808, 0.0053 1.2679 -0.081'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt11' name='vt11' center ='0.0053 1.2679 -0.081' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t11' name='t11'>
-
<!-- Visualization sphere for <HAnimJoint name='vt11'/> is placed within <HAnimSegment name='t11'/> -->
<TouchSensor description='HAnimJoint vt11, HAnimSegment t11'/>
-
<Transform translation='0.0053 1.2679 -0.081'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt11'/> to child <HAnimJoint name='vt10'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0053 1.2679 -0.081, 0.0056 1.2848 -0.0822'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt10' name='vt10' center ='0.0056 1.2848 -0.0822' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t10' name='t10'>
-
<!-- Visualization sphere for <HAnimJoint name='vt10'/> is placed within <HAnimSegment name='t10'/> -->
<TouchSensor description='HAnimJoint vt10, HAnimSegment t10'/>
-
<Transform translation='0.0056 1.2848 -0.0822'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt10'/> to child <HAnimJoint name='vt9'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0056 1.2848 -0.0822, 0.0057 1.3126 -0.0838'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt10'/> to <HAnimSite name='substernale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0056 1.2848 -0.0822, 0.0085 1.2995 0.1147'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_substernale_pt' name='substernale_pt_pt' translation='0.0085 1.2995 0.1147'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite substernale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt9' name='vt9' center ='0.0057 1.3126 -0.0838' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t9' name='t9'>
-
<!-- Visualization sphere for <HAnimJoint name='vt9'/> is placed within <HAnimSegment name='t9'/> -->
<TouchSensor description='HAnimJoint vt9, HAnimSegment t9'/>
-
<Transform translation='0.0057 1.3126 -0.0838'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt9'/> to child <HAnimJoint name='vt8'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0057 1.3126 -0.0838, 0.0057 1.3382 -0.0845'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt9'/> to <HAnimSite name='r_thelion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0057 1.3126 -0.0838, -0.0736 1.3385 0.1217'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt9'/> to <HAnimSite name='l_thelion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0057 1.3126 -0.0838, 0.0918 1.3382 0.1192'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_thelion_pt' name='r_thelion_pt_pt' translation='-0.0736 1.3385 0.1217'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_thelion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_thelion_pt' name='l_thelion_pt_pt' translation='0.0918 1.3382 0.1192'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_thelion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt8' name='vt8' center ='0.0057 1.3382 -0.0845' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t8' name='t8'>
-
<!-- Visualization sphere for <HAnimJoint name='vt8'/> is placed within <HAnimSegment name='t8'/> -->
<TouchSensor description='HAnimJoint vt8, HAnimSegment t8'/>
-
<Transform translation='0.0057 1.3382 -0.0845'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt8'/> to child <HAnimJoint name='vt7'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0057 1.3382 -0.0845, 0.0058 1.3625 -0.0833'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt7' name='vt7' center ='0.0058 1.3625 -0.0833' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t7' name='t7'>
-
<!-- Visualization sphere for <HAnimJoint name='vt7'/> is placed within <HAnimSegment name='t7'/> -->
<TouchSensor description='HAnimJoint vt7, HAnimSegment t7'/>
-
<Transform translation='0.0058 1.3625 -0.0833'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt7'/> to child <HAnimJoint name='vt6'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0058 1.3625 -0.0833, 0.0059 1.3866 -0.08'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt6' name='vt6' center ='0.0059 1.3866 -0.08' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t6' name='t6'>
-
<!-- Visualization sphere for <HAnimJoint name='vt6'/> is placed within <HAnimSegment name='t6'/> -->
<TouchSensor description='HAnimJoint vt6, HAnimSegment t6'/>
-
<Transform translation='0.0059 1.3866 -0.08'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt6'/> to child <HAnimJoint name='vt5'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0059 1.3866 -0.08, 0.006 1.4102 -0.0745'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt5' name='vt5' center ='0.006 1.4102 -0.0745' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t5' name='t5'>
-
<!-- Visualization sphere for <HAnimJoint name='vt5'/> is placed within <HAnimSegment name='t5'/> -->
<TouchSensor description='HAnimJoint vt5, HAnimSegment t5'/>
-
<Transform translation='0.006 1.4102 -0.0745'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt5'/> to child <HAnimJoint name='vt4'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.006 1.4102 -0.0745, 0.0061 1.432 -0.0675'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt4' name='vt4' center ='0.0061 1.432 -0.0675' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t4' name='t4'>
-
<!-- Visualization sphere for <HAnimJoint name='vt4'/> is placed within <HAnimSegment name='t4'/> -->
<TouchSensor description='HAnimJoint vt4, HAnimSegment t4'/>
-
<Transform translation='0.0061 1.432 -0.0675'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt4'/> to child <HAnimJoint name='vt3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0061 1.432 -0.0675, 0.0062 1.4583 -0.057'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt3' name='vt3' center ='0.0062 1.4583 -0.057' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t3' name='t3'>
-
<!-- Visualization sphere for <HAnimJoint name='vt3'/> is placed within <HAnimSegment name='t3'/> -->
<TouchSensor description='HAnimJoint vt3, HAnimSegment t3'/>
-
<Transform translation='0.0062 1.4583 -0.057'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt3'/> to child <HAnimJoint name='vt2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0062 1.4583 -0.057, 0.0063 1.4761 -0.0484'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt2' name='vt2' center ='0.0063 1.4761 -0.0484' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t2' name='t2'>
-
<!-- Visualization sphere for <HAnimJoint name='vt2'/> is placed within <HAnimSegment name='t2'/> -->
<TouchSensor description='HAnimJoint vt2, HAnimSegment t2'/>
-
<Transform translation='0.0063 1.4761 -0.0484'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt2'/> to child <HAnimJoint name='vt1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0063 1.4761 -0.0484, 0.0065 1.4951 -0.0387'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vt1' name='vt1' center ='0.0065 1.4951 -0.0387' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_t1' name='t1'>
-
<!-- Visualization sphere for <HAnimJoint name='vt1'/> is placed within <HAnimSegment name='t1'/> -->
<TouchSensor description='HAnimJoint vt1, HAnimSegment t1'/>
-
<Transform translation='0.0065 1.4951 -0.0387'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt1'/> to child <HAnimJoint name='vc7'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0065 1.4951 -0.0387, 0.0066 1.5132 -0.0301'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt1'/> to child <HAnimJoint name='l_sternoclavicular'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0065 1.4951 -0.0387, 0.082 1.4488 -0.0353'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vt1'/> to child <HAnimJoint name='r_sternoclavicular'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0065 1.4951 -0.0387, -0.082 1.4488 -0.0353'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt1'/> to <HAnimSite name='suprasternale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0065 1.4951 -0.0387, 0.0084 1.4714 0.0551'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt1'/> to <HAnimSite name='cervicale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0065 1.4951 -0.0387, 0.0064 1.52 -0.0815'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_suprasternale_pt' name='suprasternale_pt_pt' translation='0.0084 1.4714 0.0551'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite suprasternale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_cervicale_pt' name='cervicale_pt_pt' translation='0.0064 1.52 -0.0815'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite cervicale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc7' name='vc7' center ='0.0066 1.5132 -0.0301' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c7' name='c7'>
-
<!-- Visualization sphere for <HAnimJoint name='vc7'/> is placed within <HAnimSegment name='c7'/> -->
<TouchSensor description='HAnimJoint vc7, HAnimSegment c7'/>
-
<Transform translation='0.0066 1.5132 -0.0301'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vc7'/> to child <HAnimJoint name='vc6'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0066 1.5132 -0.0301, 0.0066 1.5357 -0.0143'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vc7'/> to <HAnimSite name='r_neck_base_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0066 1.5132 -0.0301, -0.0419 1.5149 -0.022'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vc7'/> to <HAnimSite name='l_neck_base_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0066 1.5132 -0.0301, 0.0646 1.5141 -0.038'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_neck_base_pt' name='r_neck_base_pt_pt' translation='-0.0419 1.5149 -0.022'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_neck_base_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_neck_base_pt' name='l_neck_base_pt_pt' translation='0.0646 1.5141 -0.038'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_neck_base_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc6' name='vc6' center ='0.0066 1.5357 -0.0143' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c6' name='c6'>
-
<!-- Visualization sphere for <HAnimJoint name='vc6'/> is placed within <HAnimSegment name='c6'/> -->
<TouchSensor description='HAnimJoint vc6, HAnimSegment c6'/>
-
<Transform translation='0.0066 1.5357 -0.0143'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vc6'/> to child <HAnimJoint name='vc5'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0066 1.5357 -0.0143, 0.0066 1.552 -0.0082'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc5' name='vc5' center ='0.0066 1.552 -0.0082' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c5' name='c5'>
-
<!-- Visualization sphere for <HAnimJoint name='vc5'/> is placed within <HAnimSegment name='c5'/> -->
<TouchSensor description='HAnimJoint vc5, HAnimSegment c5'/>
-
<Transform translation='0.0066 1.552 -0.0082'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vc5'/> to child <HAnimJoint name='vc4'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0066 1.552 -0.0082, 0.0066 1.5662 -0.0084'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc4' name='vc4' center ='0.0066 1.5662 -0.0084' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c4' name='c4'>
-
<!-- Visualization sphere for <HAnimJoint name='vc4'/> is placed within <HAnimSegment name='c4'/> -->
<TouchSensor description='HAnimJoint vc4, HAnimSegment c4'/>
-
<Transform translation='0.0066 1.5662 -0.0084'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vc4'/> to child <HAnimJoint name='vc3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0066 1.5662 -0.0084, 0.0066 1.58 -0.0103'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc3' name='vc3' center ='0.0066 1.58 -0.0103' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c3' name='c3'>
-
<!-- Visualization sphere for <HAnimJoint name='vc3'/> is placed within <HAnimSegment name='c3'/> -->
<TouchSensor description='HAnimJoint vc3, HAnimSegment c3'/>
-
<Transform translation='0.0066 1.58 -0.0103'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vc3'/> to child <HAnimJoint name='vc2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0066 1.58 -0.0103, 0.0066 1.5928 -0.0103'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc2' name='vc2' center ='0.0066 1.5928 -0.0103' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c2' name='c2'>
-
<!-- Visualization sphere for <HAnimJoint name='vc2'/> is placed within <HAnimSegment name='c2'/> -->
<TouchSensor description='HAnimJoint vc2, HAnimSegment c2'/>
-
<Transform translation='0.0066 1.5928 -0.0103'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vc2'/> to child <HAnimJoint name='vc1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0066 1.5928 -0.0103, 0.0066 1.6144 -0.0034'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_vc1' name='vc1' center ='0.0066 1.6144 -0.0034' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_c1' name='c1'>
-
<!-- Visualization sphere for <HAnimJoint name='vc1'/> is placed within <HAnimSegment name='c1'/> -->
<TouchSensor description='HAnimJoint vc1, HAnimSegment c1'/>
-
<Transform translation='0.0066 1.6144 -0.0034'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='vc1'/> to child <HAnimJoint name='skullbase'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0066 1.6144 -0.0034, 0.0044 1.6209 0.0236'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_skullbase' name='skullbase' center ='0.0044 1.6209 0.0236' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_skull' name='skull'>
-
<!-- Visualization sphere for <HAnimJoint name='skullbase'/> is placed within <HAnimSegment name='skull'/> -->
<TouchSensor description='HAnimJoint skullbase, HAnimSegment skull'/>
-
<Transform translation='0.0044 1.6209 0.0236'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='skullbase'/> to child <HAnimJoint name='l_eyeball_joint'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.0336 1.6332 0.0502'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='skullbase'/> to child <HAnimJoint name='l_eyelid_joint'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.0336 1.6332 0.0502'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='skullbase'/> to child <HAnimJoint name='l_eyebrow_joint'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.0336 1.635 0.0506'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='skullbase'/> to child <HAnimJoint name='r_eyeball_joint'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, -0.0336 1.6332 0.0502'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='skullbase'/> to child <HAnimJoint name='r_eyelid_joint'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, -0.0336 1.6332 0.0502'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='skullbase'/> to child <HAnimJoint name='r_eyebrow_joint'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, -0.0336 1.635 0.0506'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='skullbase'/> to child <HAnimJoint name='temporomandibular'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.0 1.63 0.015'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='skull_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.005 1.7504 0.0055'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='sellion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.0058 1.6316 0.0852'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_infraorbitale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, -0.0237 1.6171 0.0752'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_infraorbitale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.0341 1.6171 0.0752'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='supramenton_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.0061 1.541 0.0805'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_tragion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, -0.0646 1.6347 0.0302'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_gonion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, -0.052 1.5529 0.0347'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_tragion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.0739 1.6348 0.0282'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_gonion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.0631 1.553 0.033'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='nuchale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0044 1.6209 0.0236, 0.0039 1.5972 -0.0796'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_skull_tip' name='skull_tip_pt' translation='0.005 1.7504 0.0055'>
-
<!-- TODO move skull_tip x to zero, check others for symmetry -->
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite skull_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_sellion_pt' name='sellion_pt_pt' translation='0.0058 1.6316 0.0852'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite sellion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_infraorbitale_pt' name='r_infraorbitale_pt_pt' translation='-0.0237 1.6171 0.0752'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_infraorbitale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_infraorbitale_pt' name='l_infraorbitale_pt_pt' translation='0.0341 1.6171 0.0752'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_infraorbitale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_supramenton_pt' name='supramenton_pt_pt' translation='0.0061 1.541 0.0805'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite supramenton_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_tragion_pt' name='r_tragion_pt_pt' translation='-0.0646 1.6347 0.0302'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_tragion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_gonion_pt' name='r_gonion_pt_pt' translation='-0.052 1.5529 0.0347'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_gonion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_tragion_pt' name='l_tragion_pt_pt' translation='0.0739 1.6348 0.0282'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_tragion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_gonion_pt' name='l_gonion_pt_pt' translation='0.0631 1.553 0.033'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_gonion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_nuchale_pt' name='nuchale_pt_pt' translation='0.0039 1.5972 -0.0796'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite nuchale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_eyeball_joint' name='l_eyeball_joint' center ='0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_eyeball' name='l_eyeball'>
-
<!-- Visualization sphere for <HAnimJoint name='l_eyeball_joint'/> is placed within <HAnimSegment name='l_eyeball'/> -->
<TouchSensor description='HAnimJoint l_eyeball_joint, HAnimSegment l_eyeball'/>
-
<Transform translation='0.0336 1.6332 0.0502'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='l_eyeball_joint'/> to <HAnimSite name='l_eyeball_site_view'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0336 1.6332 0.0502, 0.034 1.64 0.05'/>
<ColorRGBA DEF='HAnimSiteViewpointLineColorRGBA' color='1 1 0 1, 1 1 0 0.1'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_eyeball_site_view' name='l_eyeball_site_view_pt' translation='0.034 1.64 0.05'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_eyeball_site_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_l_eyeball_site_viewpoint' description='l_eyeball_site_viewpoint looking forward' orientation='0 1 0 3.141593' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_l_eyeball_site_view Viewpoint ' url='"#hanim_l_eyeball_site_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape DEF='HAnimSiteViewpointShape'>
<IndexedFaceSet DEF='SiteViewpointDiamondIFS' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1' creaseAngle='0.5'>
<Coordinate point='0 0.010 0 -0.010 0 0 0 0 0.010 0.010 0 0 0 0 -0.010 0 -0.010 0'/>
</IndexedFaceSet>
<Appearance> <Material diffuseColor='1 1 0' transparency='0.3'/> </Appearance>
</Shape>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_eyelid_joint' name='l_eyelid_joint' center ='0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_eyelid' name='l_eyelid'>
-
<!-- Visualization sphere for <HAnimJoint name='l_eyelid_joint'/> is placed within <HAnimSegment name='l_eyelid'/> -->
<TouchSensor description='HAnimJoint l_eyelid_joint, HAnimSegment l_eyelid'/>
-
<Transform translation='0.0336 1.6332 0.0502'>
<Shape USE='HAnimJointShape'/>
</Transform>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_eyebrow_joint' name='l_eyebrow_joint' center ='0.0336 1.635 0.0506' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_eyebrow' name='l_eyebrow'>
-
<!-- Visualization sphere for <HAnimJoint name='l_eyebrow_joint'/> is placed within <HAnimSegment name='l_eyebrow'/> -->
<TouchSensor description='HAnimJoint l_eyebrow_joint, HAnimSegment l_eyebrow'/>
-
<Transform translation='0.0336 1.635 0.0506'>
<Shape USE='HAnimJointShape'/>
</Transform>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_eyeball_joint' name='r_eyeball_joint' center ='-0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_eyeball' name='r_eyeball'>
-
<!-- Visualization sphere for <HAnimJoint name='r_eyeball_joint'/> is placed within <HAnimSegment name='r_eyeball'/> -->
<TouchSensor description='HAnimJoint r_eyeball_joint, HAnimSegment r_eyeball'/>
-
<Transform translation='-0.0336 1.6332 0.0502'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='r_eyeball_joint'/> to <HAnimSite name='r_eyeball_site_view'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.0336 1.6332 0.0502, -0.034 1.64 0.05'/>
<ColorRGBA USE='HAnimSiteViewpointLineColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_eyeball_site_view' name='r_eyeball_site_view_pt' translation='-0.034 1.64 0.05'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_eyeball_site_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_r_eyeball_site_viewpoint' description='r_eyeball_site_viewpoint looking forward' orientation='0 1 0 3.141593' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_r_eyeball_site_view Viewpoint ' url='"#hanim_r_eyeball_site_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_eyelid_joint' name='r_eyelid_joint' center ='-0.0336 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_eyelid' name='r_eyelid'>
-
<!-- Visualization sphere for <HAnimJoint name='r_eyelid_joint'/> is placed within <HAnimSegment name='r_eyelid'/> -->
<TouchSensor description='HAnimJoint r_eyelid_joint, HAnimSegment r_eyelid'/>
-
<Transform translation='-0.0336 1.6332 0.0502'>
<Shape USE='HAnimJointShape'/>
</Transform>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_eyebrow_joint' name='r_eyebrow_joint' center ='-0.0336 1.635 0.0506' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_eyebrow' name='r_eyebrow'>
-
<!-- Visualization sphere for <HAnimJoint name='r_eyebrow_joint'/> is placed within <HAnimSegment name='r_eyebrow'/> -->
<TouchSensor description='HAnimJoint r_eyebrow_joint, HAnimSegment r_eyebrow'/>
-
<Transform translation='-0.0336 1.635 0.0506'>
<Shape USE='HAnimJointShape'/>
</Transform>
</HAnimSegment>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_temporomandibular' name='temporomandibular' center ='0.0 1.63 0.015' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
<!-- Single joint, single segment for jaw, two sites for left/right TMJs https://en.wikipedia.org/wiki/Temporomandibular_joint -->
- <HAnimSegment
DEF='hanim_jaw' name='jaw'>
-
<!-- Visualization sphere for <HAnimJoint name='temporomandibular'/> is placed within <HAnimSegment name='jaw'/> -->
<TouchSensor description='HAnimJoint temporomandibular, HAnimSegment jaw'/>
-
<Transform translation='0.0 1.63 0.015'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='temporomandibular'/> to <HAnimSite name='temporomandibular_l_site_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0 1.63 0.015, 0.045 1.63 0.0'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='temporomandibular'/> to <HAnimSite name='temporomandibular_r_site_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0 1.63 0.015, -0.045 1.63 0.0'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_temporomandibular_l_site_pt' name='temporomandibular_l_site_pt_pt' translation='0.045 1.63 0.0'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite temporomandibular_l_site_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_temporomandibular_r_site_pt' name='temporomandibular_r_site_pt_pt' translation='-0.045 1.63 0.0'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite temporomandibular_r_site_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_sternoclavicular' name='l_sternoclavicular' center ='0.082 1.4488 -0.0353' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_clavicle' name='l_clavicle'>
-
<!-- Visualization sphere for <HAnimJoint name='l_sternoclavicular'/> is placed within <HAnimSegment name='l_clavicle'/> -->
<TouchSensor description='HAnimJoint l_sternoclavicular, HAnimSegment l_clavicle'/>
-
<Transform translation='0.082 1.4488 -0.0353'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_sternoclavicular'/> to child <HAnimJoint name='l_acromioclavicular'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.082 1.4488 -0.0353, 0.0962 1.4269 -0.0424'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_clavicale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.082 1.4488 -0.0353, 0.0271 1.4943 0.0394'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_acromion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.082 1.4488 -0.0353, 0.2032 1.476 -0.049'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_axilla_ant_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.082 1.4488 -0.0353, 0.1777 1.4065 -0.0075'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_axilla_post_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.082 1.4488 -0.0353, 0.1706 1.4072 -0.0875'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_clavicale_pt' name='l_clavicale_pt_pt' translation='0.0271 1.4943 0.0394'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_clavicale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_acromion_pt' name='l_acromion_pt_pt' translation='0.2032 1.476 -0.049'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_acromion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_axilla_ant_pt' name='l_axilla_ant_pt_pt' translation='0.1777 1.4065 -0.0075'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_axilla_ant_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_axilla_post_pt' name='l_axilla_post_pt_pt' translation='0.1706 1.4072 -0.0875'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_axilla_post_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_acromioclavicular' name='l_acromioclavicular' center ='0.0962 1.4269 -0.0424' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_scapula' name='l_scapula'>
-
<!-- Visualization sphere for <HAnimJoint name='l_acromioclavicular'/> is placed within <HAnimSegment name='l_scapula'/> -->
<TouchSensor description='HAnimJoint l_acromioclavicular, HAnimSegment l_scapula'/>
-
<Transform translation='0.0962 1.4269 -0.0424'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_acromioclavicular'/> to child <HAnimJoint name='l_shoulder'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.0962 1.4269 -0.0424, 0.2029 1.4376 -0.0387'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_shoulder' name='l_shoulder' center ='0.2029 1.4376 -0.0387' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_upperarm' name='l_upperarm'>
-
<!-- Visualization sphere for <HAnimJoint name='l_shoulder'/> is placed within <HAnimSegment name='l_upperarm'/> -->
<TouchSensor description='HAnimJoint l_shoulder, HAnimSegment l_upperarm'/>
-
<Transform translation='0.2029 1.4376 -0.0387'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_shoulder'/> to child <HAnimJoint name='l_elbow'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2029 1.4376 -0.0387, 0.2014 1.1357 -0.0682'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_shoulder'/> to <HAnimSite name='l_humeral_lateral_epicn_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2029 1.4376 -0.0387, 0.228 1.1482 -0.11'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_humeral_lateral_epicn_pt' name='l_humeral_lateral_epicn_pt_pt' translation='0.228 1.1482 -0.11'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_humeral_lateral_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_elbow' name='l_elbow' center ='0.2014 1.1357 -0.0682' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_forearm' name='l_forearm'>
-
<!-- Visualization sphere for <HAnimJoint name='l_elbow'/> is placed within <HAnimSegment name='l_forearm'/> -->
<TouchSensor description='HAnimJoint l_elbow, HAnimSegment l_forearm'/>
-
<Transform translation='0.2014 1.1357 -0.0682'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_elbow'/> to child <HAnimJoint name='l_wrist'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2014 1.1357 -0.0682, 0.1984 0.8663 -0.0583'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_radial_styloid_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2014 1.1357 -0.0682, 0.1901 0.8645 -0.0415'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_olecranon_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2014 1.1357 -0.0682, 0.1962 1.1375 -0.1123'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_humeral_medial_epicn_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2014 1.1357 -0.0682, 0.1735 1.1272 -0.1113'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_radiale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2014 1.1357 -0.0682, 0.2182 1.1212 -0.1167'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_radial_styloid_pt' name='l_radial_styloid_pt_pt' translation='0.1901 0.8645 -0.0415'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_radial_styloid_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_olecranon_pt' name='l_olecranon_pt_pt' translation='0.1962 1.1375 -0.1123'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_olecranon_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_humeral_medial_epicn_pt' name='l_humeral_medial_epicn_pt_pt' translation='0.1735 1.1272 -0.1113'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_humeral_medial_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_radiale_pt' name='l_radiale_pt_pt' translation='0.2182 1.1212 -0.1167'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_radiale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_wrist' name='l_wrist' center ='0.1984 0.8663 -0.0583' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_hand' name='l_hand'>
-
<!-- Visualization sphere for <HAnimJoint name='l_wrist'/> is placed within <HAnimSegment name='l_hand'/> -->
<TouchSensor description='HAnimJoint l_wrist, HAnimSegment l_hand'/>
-
<Transform translation='0.1984 0.8663 -0.0583'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_wrist'/> to child <HAnimJoint name='l_thumb1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1984 0.8663 -0.0583, 0.1924 0.8472 -0.0534'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_wrist'/> to child <HAnimJoint name='l_index0'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1984 0.8663 -0.0583, 0.1983 0.8024 -0.028'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_wrist'/> to child <HAnimJoint name='l_middle0'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1984 0.8663 -0.0583, 0.1987 0.8029 -0.053'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_wrist'/> to child <HAnimJoint name='l_ring0'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1984 0.8663 -0.0583, 0.1956 0.8019 -0.0794'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_wrist'/> to child <HAnimJoint name='l_pinky0'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1984 0.8663 -0.0583, 0.1925 0.8066 -0.1036'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_metacarpal_pha2_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1984 0.8663 -0.0583, 0.2009 0.8139 -0.0237'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_ulnar_styloid_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1984 0.8663 -0.0583, 0.2142 0.8529 -0.0648'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_metacarpal_pha5_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1984 0.8663 -0.0583, 0.1929 0.786 -0.1122'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_hand_front_view'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1984 0.8663 -0.0583, 0.3 0.75 0.45'/>
<ColorRGBA USE='HAnimSiteViewpointLineColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_metacarpal_pha2_pt' name='l_metacarpal_pha2_pt_pt' translation='0.2009 0.8139 -0.0237'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_metacarpal_pha2_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_ulnar_styloid_pt' name='l_ulnar_styloid_pt_pt' translation='0.2142 0.8529 -0.0648'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_ulnar_styloid_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_metacarpal_pha5_pt' name='l_metacarpal_pha5_pt_pt' translation='0.1929 0.786 -0.1122'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_metacarpal_pha5_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_hand_front_view' name='l_hand_front_view_pt' translation='0.3 0.75 0.45'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_hand_front_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_l_hand_front_viewpoint' centerOfRotation='0 0.7 0' description='left hand front' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_l_hand_front_view Viewpoint ' url='"#hanim_l_hand_front_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_thumb1' name='l_thumb1' center ='0.1924 0.8472 -0.0534' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_thumb_metacarpal' name='l_thumb_metacarpal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_thumb1'/> is placed within <HAnimSegment name='l_thumb_metacarpal'/> -->
<TouchSensor description='HAnimJoint l_thumb1, HAnimSegment l_thumb_metacarpal'/>
-
<Transform translation='0.1924 0.8472 -0.0534'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_thumb1'/> to child <HAnimJoint name='l_thumb2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1924 0.8472 -0.0534, 0.1951 0.8226 0.0246'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_thumb2' name='l_thumb2' center ='0.1951 0.8226 0.0246' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_thumb_proximal' name='l_thumb_proximal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_thumb2'/> is placed within <HAnimSegment name='l_thumb_proximal'/> -->
<TouchSensor description='HAnimJoint l_thumb2, HAnimSegment l_thumb_proximal'/>
-
<Transform translation='0.1951 0.8226 0.0246'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_thumb2'/> to child <HAnimJoint name='l_thumb3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1951 0.8226 0.0246, 0.1955 0.8159 0.0464'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_thumb3' name='l_thumb3' center ='0.1955 0.8159 0.0464' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_thumb_distal' name='l_thumb_distal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_thumb3'/> is placed within <HAnimSegment name='l_thumb_distal'/> -->
<TouchSensor description='HAnimJoint l_thumb3, HAnimSegment l_thumb_distal'/>
-
<Transform translation='0.1955 0.8159 0.0464'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_thumb3'/> to <HAnimSite name='l_thumb_distal_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1955 0.8159 0.0464, 0.1982 0.8061 0.0759'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_thumb_distal_tip' name='l_thumb_distal_tip_pt' translation='0.1982 0.8061 0.0759'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_thumb_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_index0' name='l_index0' center ='0.1983 0.8024 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_index_metacarpal' name='l_index_metacarpal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_index0'/> is placed within <HAnimSegment name='l_index_metacarpal'/> -->
<TouchSensor description='HAnimJoint l_index0, HAnimSegment l_index_metacarpal'/>
-
<Transform translation='0.1983 0.8024 -0.028'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_index0'/> to child <HAnimJoint name='l_index1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1983 0.8024 -0.028, 0.1983 0.7815 -0.028'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_index1' name='l_index1' center ='0.1983 0.7815 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_index_proximal' name='l_index_proximal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_index1'/> is placed within <HAnimSegment name='l_index_proximal'/> -->
<TouchSensor description='HAnimJoint l_index1, HAnimSegment l_index_proximal'/>
-
<Transform translation='0.1983 0.7815 -0.028'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_index1'/> to child <HAnimJoint name='l_index2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1983 0.7815 -0.028, 0.2017 0.7363 -0.0248'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_index2' name='l_index2' center ='0.2017 0.7363 -0.0248' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_index_middle' name='l_index_middle'>
-
<!-- Visualization sphere for <HAnimJoint name='l_index2'/> is placed within <HAnimSegment name='l_index_middle'/> -->
<TouchSensor description='HAnimJoint l_index2, HAnimSegment l_index_middle'/>
-
<Transform translation='0.2017 0.7363 -0.0248'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_index2'/> to child <HAnimJoint name='l_index3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2017 0.7363 -0.0248, 0.2028 0.7139 -0.0236'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_index3' name='l_index3' center ='0.2028 0.7139 -0.0236' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_index_distal' name='l_index_distal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_index3'/> is placed within <HAnimSegment name='l_index_distal'/> -->
<TouchSensor description='HAnimJoint l_index3, HAnimSegment l_index_distal'/>
-
<Transform translation='0.2028 0.7139 -0.0236'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_index3'/> to <HAnimSite name='l_index_distal_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2028 0.7139 -0.0236, 0.2089 0.6858 -0.0245'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_index3'/> to <HAnimSite name='l_dactylion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2028 0.7139 -0.0236, 0.2056 0.6743 -0.0482'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_index_distal_tip' name='l_index_distal_tip_pt' translation='0.2089 0.6858 -0.0245'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_index_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_l_dactylion_pt' name='l_dactylion_pt_pt' translation='0.2056 0.6743 -0.0482'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_dactylion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_middle0' name='l_middle0' center ='0.1987 0.8029 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_middle_metacarpal' name='l_middle_metacarpal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_middle0'/> is placed within <HAnimSegment name='l_middle_metacarpal'/> -->
<TouchSensor description='HAnimJoint l_middle0, HAnimSegment l_middle_metacarpal'/>
-
<Transform translation='0.1987 0.8029 -0.053'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_middle0'/> to child <HAnimJoint name='l_middle1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1987 0.8029 -0.053, 0.1987 0.7818 -0.053'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_middle1' name='l_middle1' center ='0.1987 0.7818 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_middle_proximal' name='l_middle_proximal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_middle1'/> is placed within <HAnimSegment name='l_middle_proximal'/> -->
<TouchSensor description='HAnimJoint l_middle1, HAnimSegment l_middle_proximal'/>
-
<Transform translation='0.1987 0.7818 -0.053'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_middle1'/> to child <HAnimJoint name='l_middle2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1987 0.7818 -0.053, 0.2013 0.7273 -0.0503'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_middle2' name='l_middle2' center ='0.2013 0.7273 -0.0503' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_middle_middle' name='l_middle_middle'>
-
<!-- Visualization sphere for <HAnimJoint name='l_middle2'/> is placed within <HAnimSegment name='l_middle_middle'/> -->
<TouchSensor description='HAnimJoint l_middle2, HAnimSegment l_middle_middle'/>
-
<Transform translation='0.2013 0.7273 -0.0503'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_middle2'/> to child <HAnimJoint name='l_middle3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2013 0.7273 -0.0503, 0.2026 0.7011 -0.0494'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_middle3' name='l_middle3' center ='0.2026 0.7011 -0.0494' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_middle_distal' name='l_middle_distal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_middle3'/> is placed within <HAnimSegment name='l_middle_distal'/> -->
<TouchSensor description='HAnimJoint l_middle3, HAnimSegment l_middle_distal'/>
-
<Transform translation='0.2026 0.7011 -0.0494'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_middle3'/> to <HAnimSite name='l_middle_distal_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.2026 0.7011 -0.0494, 0.208 0.6731 -0.0491'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_middle_distal_tip' name='l_middle_distal_tip_pt' translation='0.208 0.6731 -0.0491'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_middle_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_ring0' name='l_ring0' center ='0.1956 0.8019 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_ring_metacarpal' name='l_ring_metacarpal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_ring0'/> is placed within <HAnimSegment name='l_ring_metacarpal'/> -->
<TouchSensor description='HAnimJoint l_ring0, HAnimSegment l_ring_metacarpal'/>
-
<Transform translation='0.1956 0.8019 -0.0794'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_ring0'/> to child <HAnimJoint name='l_ring1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1956 0.8019 -0.0794, 0.1956 0.7815 -0.0794'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_ring1' name='l_ring1' center ='0.1956 0.7815 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_ring_proximal' name='l_ring_proximal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_ring1'/> is placed within <HAnimSegment name='l_ring_proximal'/> -->
<TouchSensor description='HAnimJoint l_ring1, HAnimSegment l_ring_proximal'/>
-
<Transform translation='0.1956 0.7815 -0.0794'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_ring1'/> to child <HAnimJoint name='l_ring2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1956 0.7815 -0.0794, 0.1973 0.7287 -0.0777'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_ring2' name='l_ring2' center ='0.1973 0.7287 -0.0777' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_ring_middle' name='l_ring_middle'>
-
<!-- Visualization sphere for <HAnimJoint name='l_ring2'/> is placed within <HAnimSegment name='l_ring_middle'/> -->
<TouchSensor description='HAnimJoint l_ring2, HAnimSegment l_ring_middle'/>
-
<Transform translation='0.1973 0.7287 -0.0777'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_ring2'/> to child <HAnimJoint name='l_ring3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1973 0.7287 -0.0777, 0.1983 0.7045 -0.0767'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_ring3' name='l_ring3' center ='0.1983 0.7045 -0.0767' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_ring_distal' name='l_ring_distal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_ring3'/> is placed within <HAnimSegment name='l_ring_distal'/> -->
<TouchSensor description='HAnimJoint l_ring3, HAnimSegment l_ring_distal'/>
-
<Transform translation='0.1983 0.7045 -0.0767'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ring3'/> to <HAnimSite name='l_ring_distal_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1983 0.7045 -0.0767, 0.2035 0.675 -0.0756'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_ring_distal_tip' name='l_ring_distal_tip_pt' translation='0.2035 0.675 -0.0756'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_ring_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_l_pinky0' name='l_pinky0' center ='0.1925 0.8066 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_pinky_metacarpal' name='l_pinky_metacarpal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_pinky0'/> is placed within <HAnimSegment name='l_pinky_metacarpal'/> -->
<TouchSensor description='HAnimJoint l_pinky0, HAnimSegment l_pinky_metacarpal'/>
-
<Transform translation='0.1925 0.8066 -0.1036'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_pinky0'/> to child <HAnimJoint name='l_pinky1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1925 0.8066 -0.1036, 0.1925 0.7866 -0.1036'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_pinky1' name='l_pinky1' center ='0.1925 0.7866 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_pinky_proximal' name='l_pinky_proximal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_pinky1'/> is placed within <HAnimSegment name='l_pinky_proximal'/> -->
<TouchSensor description='HAnimJoint l_pinky1, HAnimSegment l_pinky_proximal'/>
-
<Transform translation='0.1925 0.7866 -0.1036'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_pinky1'/> to child <HAnimJoint name='l_pinky2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1925 0.7866 -0.1036, 0.1938 0.7452 -0.1024'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_pinky2' name='l_pinky2' center ='0.1938 0.7452 -0.1024' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_pinky_middle' name='l_pinky_middle'>
-
<!-- Visualization sphere for <HAnimJoint name='l_pinky2'/> is placed within <HAnimSegment name='l_pinky_middle'/> -->
<TouchSensor description='HAnimJoint l_pinky2, HAnimSegment l_pinky_middle'/>
-
<Transform translation='0.1938 0.7452 -0.1024'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='l_pinky2'/> to child <HAnimJoint name='l_pinky3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1938 0.7452 -0.1024, 0.1948 0.7277 -0.1017'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_l_pinky3' name='l_pinky3' center ='0.1948 0.7277 -0.1017' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_l_pinky_distal' name='l_pinky_distal'>
-
<!-- Visualization sphere for <HAnimJoint name='l_pinky3'/> is placed within <HAnimSegment name='l_pinky_distal'/> -->
<TouchSensor description='HAnimJoint l_pinky3, HAnimSegment l_pinky_distal'/>
-
<Transform translation='0.1948 0.7277 -0.1017'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_pinky3'/> to <HAnimSite name='l_pinky_distal_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='0.1948 0.7277 -0.1017, 0.2014 0.7009 -0.1012'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_l_pinky_distal_tip' name='l_pinky_distal_tip_pt' translation='0.2014 0.7009 -0.1012'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_pinky_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_sternoclavicular' name='r_sternoclavicular' center ='-0.082 1.4488 -0.0353' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_clavicle' name='r_clavicle'>
-
<!-- Visualization sphere for <HAnimJoint name='r_sternoclavicular'/> is placed within <HAnimSegment name='r_clavicle'/> -->
<TouchSensor description='HAnimJoint r_sternoclavicular, HAnimSegment r_clavicle'/>
-
<Transform translation='-0.082 1.4488 -0.0353'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_sternoclavicular'/> to child <HAnimJoint name='r_acromioclavicular'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.082 1.4488 -0.0353, -0.0962 1.4269 -0.0424'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_clavicale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.082 1.4488 -0.0353, -0.0115 1.4943 0.04'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_acromion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.082 1.4488 -0.0353, -0.1905 1.4791 -0.0431'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_axilla_ant_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.082 1.4488 -0.0353, -0.1626 1.4072 -0.0031'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_axilla_post_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.082 1.4488 -0.0353, -0.1603 1.4098 -0.0826'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_clavicale_pt' name='r_clavicale_pt_pt' translation='-0.0115 1.4943 0.04'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_clavicale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_acromion_pt' name='r_acromion_pt_pt' translation='-0.1905 1.4791 -0.0431'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_acromion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_axilla_ant_pt' name='r_axilla_ant_pt_pt' translation='-0.1626 1.4072 -0.0031'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_axilla_ant_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_axilla_post_pt' name='r_axilla_post_pt_pt' translation='-0.1603 1.4098 -0.0826'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_axilla_post_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_acromioclavicular' name='r_acromioclavicular' center ='-0.0962 1.4269 -0.0424' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_scapula' name='r_scapula'>
-
<!-- Visualization sphere for <HAnimJoint name='r_acromioclavicular'/> is placed within <HAnimSegment name='r_scapula'/> -->
<TouchSensor description='HAnimJoint r_acromioclavicular, HAnimSegment r_scapula'/>
-
<Transform translation='-0.0962 1.4269 -0.0424'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_acromioclavicular'/> to child <HAnimJoint name='r_shoulder'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.0962 1.4269 -0.0424, -0.2029 1.4376 -0.0387'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_shoulder' name='r_shoulder' center ='-0.2029 1.4376 -0.0387' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_upperarm' name='r_upperarm'>
-
<!-- Visualization sphere for <HAnimJoint name='r_shoulder'/> is placed within <HAnimSegment name='r_upperarm'/> -->
<TouchSensor description='HAnimJoint r_shoulder, HAnimSegment r_upperarm'/>
-
<Transform translation='-0.2029 1.4376 -0.0387'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_shoulder'/> to child <HAnimJoint name='r_elbow'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2029 1.4376 -0.0387, -0.2014 1.1357 -0.0682'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_shoulder'/> to <HAnimSite name='r_humeral_lateral_epicn_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2029 1.4376 -0.0387, -0.2224 1.1517 -0.1033'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_humeral_lateral_epicn_pt' name='r_humeral_lateral_epicn_pt_pt' translation='-0.2224 1.1517 -0.1033'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_humeral_lateral_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_elbow' name='r_elbow' center ='-0.2014 1.1357 -0.0682' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_forearm' name='r_forearm'>
-
<!-- Visualization sphere for <HAnimJoint name='r_elbow'/> is placed within <HAnimSegment name='r_forearm'/> -->
<TouchSensor description='HAnimJoint r_elbow, HAnimSegment r_forearm'/>
-
<Transform translation='-0.2014 1.1357 -0.0682'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_elbow'/> to child <HAnimJoint name='r_wrist'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2014 1.1357 -0.0682, -0.1984 0.8663 -0.0583'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_radial_styloid_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2014 1.1357 -0.0682, -0.1884 0.8676 -0.036'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_olecranon_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2014 1.1357 -0.0682, -0.1907 1.1405 -0.1065'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_humeral_medial_epicn_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2014 1.1357 -0.0682, -0.168 1.1298 -0.1062'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_radiale_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2014 1.1357 -0.0682, -0.213 1.1305 -0.1091'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_radial_styloid_pt' name='r_radial_styloid_pt_pt' translation='-0.1884 0.8676 -0.036'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_radial_styloid_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_olecranon_pt' name='r_olecranon_pt_pt' translation='-0.1907 1.1405 -0.1065'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_olecranon_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_humeral_medial_epicn_pt' name='r_humeral_medial_epicn_pt_pt' translation='-0.168 1.1298 -0.1062'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_humeral_medial_epicn_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_radiale_pt' name='r_radiale_pt_pt' translation='-0.213 1.1305 -0.1091'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_radiale_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_wrist' name='r_wrist' center ='-0.1984 0.8663 -0.0583' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_hand' name='r_hand'>
-
<!-- Visualization sphere for <HAnimJoint name='r_wrist'/> is placed within <HAnimSegment name='r_hand'/> -->
<TouchSensor description='HAnimJoint r_wrist, HAnimSegment r_hand'/>
-
<Transform translation='-0.1984 0.8663 -0.0583'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_wrist'/> to child <HAnimJoint name='r_thumb1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1984 0.8663 -0.0583, -0.1924 0.8472 -0.0534'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_wrist'/> to child <HAnimJoint name='r_index0'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1984 0.8663 -0.0583, -0.1983 0.8024 -0.028'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_wrist'/> to child <HAnimJoint name='r_middle0'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1984 0.8663 -0.0583, -0.1987 0.8029 -0.053'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_wrist'/> to child <HAnimJoint name='r_ring0'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1984 0.8663 -0.0583, -0.1956 0.8019 -0.0794'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_wrist'/> to child <HAnimJoint name='r_pinky0'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1984 0.8663 -0.0583, -0.1925 0.8066 -0.1036'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_metacarpal_pha2_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1984 0.8663 -0.0583, -0.1977 0.8169 -0.0177'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_ulnar_styloid_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1984 0.8663 -0.0583, -0.2117 0.8562 -0.0584'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_metacarpal_pha5_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1984 0.8663 -0.0583, -0.1929 0.789 -0.1064'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_hand_front_view'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1984 0.8663 -0.0583, -0.3 0.75 0.45'/>
<ColorRGBA USE='HAnimSiteViewpointLineColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_metacarpal_pha2_pt' name='r_metacarpal_pha2_pt_pt' translation='-0.1977 0.8169 -0.0177'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_metacarpal_pha2_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_ulnar_styloid_pt' name='r_ulnar_styloid_pt_pt' translation='-0.2117 0.8562 -0.0584'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_ulnar_styloid_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_metacarpal_pha5_pt' name='r_metacarpal_pha5_pt_pt' translation='-0.1929 0.789 -0.1064'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_metacarpal_pha5_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_hand_front_view' name='r_hand_front_view_pt' translation='-0.3 0.75 0.45'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_hand_front_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_r_hand_front_viewpoint' centerOfRotation='0 0.7 0' description='right hand front' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_r_hand_front_view Viewpoint ' url='"#hanim_r_hand_front_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_thumb1' name='r_thumb1' center ='-0.1924 0.8472 -0.0534' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_thumb_metacarpal' name='r_thumb_metacarpal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_thumb1'/> is placed within <HAnimSegment name='r_thumb_metacarpal'/> -->
<TouchSensor description='HAnimJoint r_thumb1, HAnimSegment r_thumb_metacarpal'/>
-
<Transform translation='-0.1924 0.8472 -0.0534'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_thumb1'/> to child <HAnimJoint name='r_thumb2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1924 0.8472 -0.0534, -0.1951 0.8226 0.0246'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_thumb2' name='r_thumb2' center ='-0.1951 0.8226 0.0246' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_thumb_proximal' name='r_thumb_proximal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_thumb2'/> is placed within <HAnimSegment name='r_thumb_proximal'/> -->
<TouchSensor description='HAnimJoint r_thumb2, HAnimSegment r_thumb_proximal'/>
-
<Transform translation='-0.1951 0.8226 0.0246'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_thumb2'/> to child <HAnimJoint name='r_thumb3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1951 0.8226 0.0246, -0.1955 0.8159 0.0464'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_thumb3' name='r_thumb3' center ='-0.1955 0.8159 0.0464' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_thumb_distal' name='r_thumb_distal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_thumb3'/> is placed within <HAnimSegment name='r_thumb_distal'/> -->
<TouchSensor description='HAnimJoint r_thumb3, HAnimSegment r_thumb_distal'/>
-
<Transform translation='-0.1955 0.8159 0.0464'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_thumb3'/> to <HAnimSite name='r_thumb_distal_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1955 0.8159 0.0464, -0.1869 0.809 0.082'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_thumb_distal_tip' name='r_thumb_distal_tip_pt' translation='-0.1869 0.809 0.082'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_thumb_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_index0' name='r_index0' center ='-0.1983 0.8024 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_index_metacarpal' name='r_index_metacarpal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_index0'/> is placed within <HAnimSegment name='r_index_metacarpal'/> -->
<TouchSensor description='HAnimJoint r_index0, HAnimSegment r_index_metacarpal'/>
-
<Transform translation='-0.1983 0.8024 -0.028'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_index0'/> to child <HAnimJoint name='r_index1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1983 0.8024 -0.028, -0.1983 0.7815 -0.028'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_index1' name='r_index1' center ='-0.1983 0.7815 -0.028' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_index_proximal' name='r_index_proximal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_index1'/> is placed within <HAnimSegment name='r_index_proximal'/> -->
<TouchSensor description='HAnimJoint r_index1, HAnimSegment r_index_proximal'/>
-
<Transform translation='-0.1983 0.7815 -0.028'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_index1'/> to child <HAnimJoint name='r_index2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1983 0.7815 -0.028, -0.2017 0.7363 -0.0248'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_index2' name='r_index2' center ='-0.2017 0.7363 -0.0248' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_index_middle' name='r_index_middle'>
-
<!-- Visualization sphere for <HAnimJoint name='r_index2'/> is placed within <HAnimSegment name='r_index_middle'/> -->
<TouchSensor description='HAnimJoint r_index2, HAnimSegment r_index_middle'/>
-
<Transform translation='-0.2017 0.7363 -0.0248'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_index2'/> to child <HAnimJoint name='r_index3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2017 0.7363 -0.0248, -0.2028 0.7139 -0.0236'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_index3' name='r_index3' center ='-0.2028 0.7139 -0.0236' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_index_distal' name='r_index_distal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_index3'/> is placed within <HAnimSegment name='r_index_distal'/> -->
<TouchSensor description='HAnimJoint r_index3, HAnimSegment r_index_distal'/>
-
<Transform translation='-0.2028 0.7139 -0.0236'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_index3'/> to <HAnimSite name='r_index_distal_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2028 0.7139 -0.0236, -0.198 0.6883 -0.018'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_index3'/> to <HAnimSite name='r_dactylion_pt'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2028 0.7139 -0.0236, -0.1941 0.6772 -0.0423'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_index_distal_tip' name='r_index_distal_tip_pt' translation='-0.198 0.6883 -0.018'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_index_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
- <HAnimSite
DEF='hanim_r_dactylion_pt' name='r_dactylion_pt_pt' translation='-0.1941 0.6772 -0.0423'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_dactylion_pt'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_middle0' name='r_middle0' center ='-0.1987 0.8029 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_middle_metacarpal' name='r_middle_metacarpal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_middle0'/> is placed within <HAnimSegment name='r_middle_metacarpal'/> -->
<TouchSensor description='HAnimJoint r_middle0, HAnimSegment r_middle_metacarpal'/>
-
<Transform translation='-0.1987 0.8029 -0.053'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_middle0'/> to child <HAnimJoint name='r_middle1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1987 0.8029 -0.053, -0.1987 0.7818 -0.053'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_middle1' name='r_middle1' center ='-0.1987 0.7818 -0.053' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_middle_proximal' name='r_middle_proximal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_middle1'/> is placed within <HAnimSegment name='r_middle_proximal'/> -->
<TouchSensor description='HAnimJoint r_middle1, HAnimSegment r_middle_proximal'/>
-
<Transform translation='-0.1987 0.7818 -0.053'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_middle1'/> to child <HAnimJoint name='r_middle2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1987 0.7818 -0.053, -0.2013 0.7273 -0.0503'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_middle2' name='r_middle2' center ='-0.2013 0.7273 -0.0503' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_middle_middle' name='r_middle_middle'>
-
<!-- Visualization sphere for <HAnimJoint name='r_middle2'/> is placed within <HAnimSegment name='r_middle_middle'/> -->
<TouchSensor description='HAnimJoint r_middle2, HAnimSegment r_middle_middle'/>
-
<Transform translation='-0.2013 0.7273 -0.0503'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_middle2'/> to child <HAnimJoint name='r_middle3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2013 0.7273 -0.0503, -0.2026 0.7011 -0.0494'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_middle3' name='r_middle3' center ='-0.2026 0.7011 -0.0494' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_middle_distal' name='r_middle_distal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_middle3'/> is placed within <HAnimSegment name='r_middle_distal'/> -->
<TouchSensor description='HAnimJoint r_middle3, HAnimSegment r_middle_distal'/>
-
<Transform translation='-0.2026 0.7011 -0.0494'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_middle3'/> to <HAnimSite name='r_middle_distal_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.2026 0.7011 -0.0494, -0.1969 0.6758 -0.0427'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_middle_distal_tip' name='r_middle_distal_tip_pt' translation='-0.1969 0.6758 -0.0427'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_middle_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_ring0' name='r_ring0' center ='-0.1956 0.8019 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_ring_metacarpal' name='r_ring_metacarpal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_ring0'/> is placed within <HAnimSegment name='r_ring_metacarpal'/> -->
<TouchSensor description='HAnimJoint r_ring0, HAnimSegment r_ring_metacarpal'/>
-
<Transform translation='-0.1956 0.8019 -0.0794'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_ring0'/> to child <HAnimJoint name='r_ring1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1956 0.8019 -0.0794, -0.1956 0.7815 -0.0794'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_ring1' name='r_ring1' center ='-0.1956 0.7815 -0.0794' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_ring_proximal' name='r_ring_proximal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_ring1'/> is placed within <HAnimSegment name='r_ring_proximal'/> -->
<TouchSensor description='HAnimJoint r_ring1, HAnimSegment r_ring_proximal'/>
-
<Transform translation='-0.1956 0.7815 -0.0794'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_ring1'/> to child <HAnimJoint name='r_ring2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1956 0.7815 -0.0794, -0.1973 0.7287 -0.0777'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_ring2' name='r_ring2' center ='-0.1973 0.7287 -0.0777' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_ring_middle' name='r_ring_middle'>
-
<!-- Visualization sphere for <HAnimJoint name='r_ring2'/> is placed within <HAnimSegment name='r_ring_middle'/> -->
<TouchSensor description='HAnimJoint r_ring2, HAnimSegment r_ring_middle'/>
-
<Transform translation='-0.1973 0.7287 -0.0777'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_ring2'/> to child <HAnimJoint name='r_ring3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1973 0.7287 -0.0777, -0.1983 0.7045 -0.0767'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_ring3' name='r_ring3' center ='-0.1983 0.7045 -0.0767' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_ring_distal' name='r_ring_distal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_ring3'/> is placed within <HAnimSegment name='r_ring_distal'/> -->
<TouchSensor description='HAnimJoint r_ring3, HAnimSegment r_ring_distal'/>
-
<Transform translation='-0.1983 0.7045 -0.0767'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ring3'/> to <HAnimSite name='r_ring_distal_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1983 0.7045 -0.0767, -0.1934 0.6778 -0.0693'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_ring_distal_tip' name='r_ring_distal_tip_pt' translation='-0.1934 0.6778 -0.0693'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_ring_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
- <HAnimJoint
DEF='hanim_r_pinky0' name='r_pinky0' center ='-0.1925 0.8066 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_pinky_metacarpal' name='r_pinky_metacarpal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_pinky0'/> is placed within <HAnimSegment name='r_pinky_metacarpal'/> -->
<TouchSensor description='HAnimJoint r_pinky0, HAnimSegment r_pinky_metacarpal'/>
-
<Transform translation='-0.1925 0.8066 -0.1036'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_pinky0'/> to child <HAnimJoint name='r_pinky1'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1925 0.8066 -0.1036, -0.1925 0.7866 -0.1036'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_pinky1' name='r_pinky1' center ='-0.1925 0.7866 -0.1036' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_pinky_proximal' name='r_pinky_proximal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_pinky1'/> is placed within <HAnimSegment name='r_pinky_proximal'/> -->
<TouchSensor description='HAnimJoint r_pinky1, HAnimSegment r_pinky_proximal'/>
-
<Transform translation='-0.1925 0.7866 -0.1036'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_pinky1'/> to child <HAnimJoint name='r_pinky2'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1925 0.7866 -0.1036, -0.1938 0.7452 -0.1024'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_pinky2' name='r_pinky2' center ='-0.1938 0.7452 -0.1024' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_pinky_middle' name='r_pinky_middle'>
-
<!-- Visualization sphere for <HAnimJoint name='r_pinky2'/> is placed within <HAnimSegment name='r_pinky_middle'/> -->
<TouchSensor description='HAnimJoint r_pinky2, HAnimSegment r_pinky_middle'/>
-
<Transform translation='-0.1938 0.7452 -0.1024'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSegment visualization line from current <HAnimJoint name='r_pinky2'/> to child <HAnimJoint name='r_pinky3'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1938 0.7452 -0.1024, -0.1948 0.7277 -0.1017'/>
<ColorRGBA USE='HAnimSegmentLineColorRGBA'/>
</LineSet>
</Shape>
</HAnimSegment>
- <HAnimJoint
DEF='hanim_r_pinky3' name='r_pinky3' center ='-0.1948 0.7277 -0.1017' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
- <HAnimSegment
DEF='hanim_r_pinky_distal' name='r_pinky_distal'>
-
<!-- Visualization sphere for <HAnimJoint name='r_pinky3'/> is placed within <HAnimSegment name='r_pinky_distal'/> -->
<TouchSensor description='HAnimJoint r_pinky3, HAnimSegment r_pinky_distal'/>
-
<Transform translation='-0.1948 0.7277 -0.1017'>
<Shape USE='HAnimJointShape'/>
</Transform>
-
<!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_pinky3'/> to <HAnimSite name='r_pinky_distal_tip'/> -->
<Shape>
<LineSet vertexCount='2'>
<Coordinate point='-0.1948 0.7277 -0.1017, -0.1938 0.7035 -0.0949'/>
<ColorRGBA USE='HAnimSiteColorRGBA'/>
</LineSet>
</Shape>
- <HAnimSite
DEF='hanim_r_pinky_distal_tip' name='r_pinky_distal_tip_pt' translation='-0.1938 0.7035 -0.0949'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_pinky_distal_tip'/>
-
<Shape USE='HAnimSiteShape'/>
</HAnimSite>
</HAnimSegment>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
</HAnimJoint>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_l_inclined_view' name='l_inclined_view' containerField ='viewpoints' rotation='-0.113 0.993 0.0347 0.671' translation='1.62 1.05 2.06' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_inclined_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_l_inclined_viewpoint' description='left inclined' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_l_inclined_view Viewpoint ' url='"#hanim_l_inclined_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_r_inclined_view' name='r_inclined_view' containerField ='viewpoints' rotation='-0.113 -0.993 0.0347 0.671' translation='-1.62 1.05 2.06' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite r_inclined_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_r_inclined_viewpoint' centerOfRotation='0 0.9 0' description='right inclined' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_r_inclined_view Viewpoint ' url='"#hanim_r_inclined_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_front_view' name='front_view' containerField ='viewpoints' translation='0 0.85 2.58' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite front_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_front_viewpoint' centerOfRotation='0 0.9 0' description='front' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_front_view Viewpoint ' url='"#hanim_front_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_back_view' name='back_view' containerField ='viewpoints' rotation='0 1 0 3.14' translation='0 0.85 -2.58' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite back_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_back_viewpoint' centerOfRotation='0 0.9 0' description='back' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_back_view Viewpoint ' url='"#hanim_back_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_l_side_view' name='l_side_view' containerField ='viewpoints' rotation='0 1 0 1.5708' translation='2.6 0.854 0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite l_side_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_l_side_viewpoint' centerOfRotation='0 0.9 0' description='left side' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_l_side_view Viewpoint ' url='"#hanim_l_side_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
- <HAnimSite
DEF='hanim_Top_view' name='Top_view' containerField ='viewpoints' rotation='1 0 0 -1.57' translation='0 3.5 0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite Top_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_Top_viewpoint' centerOfRotation='0 0.9 0' description='Top' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_Top_view Viewpoint ' url='"#hanim_Top_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_front_close_view' name='front_close_view' containerField ='viewpoints' translation='0 0.854 1.575' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_front_close_viewpoint' centerOfRotation='0 0 1.575' description='front close' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_front_close_view Viewpoint ' url='"#hanim_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_side_close_view' name='side_close_view' containerField ='viewpoints' rotation='0 1 0 1.5708' translation='1.56 0.854 0' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite side_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_side_close_viewpoint' centerOfRotation='1.6 0 0' description='side close' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_side_close_view Viewpoint ' url='"#hanim_side_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_head_front_close_view' name='head_front_close_view' containerField ='viewpoints' translation='0 1.5 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite head_front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_head_front_close_viewpoint' centerOfRotation='0 0 1' description='head front close' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_head_front_close_view Viewpoint ' url='"#hanim_head_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_chest_front_close_view' name='chest_front_close_view' containerField ='viewpoints' translation='0 1.2 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite chest_front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_chest_front_close_viewpoint' centerOfRotation='0 0 1' description='chest front close' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_chest_front_close_view Viewpoint ' url='"#hanim_chest_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_pelvis_front_close_view' name='pelvis_front_close_view' containerField ='viewpoints' translation='0 0.8 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite pelvis_front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_pelvis_front_close_viewpoint' centerOfRotation='0 0 1' description='pelvis front close' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_pelvis_front_close_view Viewpoint ' url='"#hanim_pelvis_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_knees_front_close_view' name='knees_front_close_view' containerField ='viewpoints' translation='0 0.4 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite knees_front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_knees_front_close_viewpoint' centerOfRotation='0 0.4 0' description='knees front close' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_knees_front_close_view Viewpoint ' url='"#hanim_knees_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
- <HAnimSite
DEF='hanim_feet_front_close_view' name='feet_front_close_view' containerField ='viewpoints' translation='0 0 1' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite feet_front_close_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_feet_front_close_viewpoint' description='feet front close' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_feet_front_close_view Viewpoint ' url='"#hanim_feet_front_close_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
<!-- Only one root HAnimJoint is expected -->
<!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools -->
<!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation -->
<!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default -->
<!-- right between the eyes, stationary position not animating except with body itself -->
- <HAnimSite
DEF='hanim_eye_level_view' name='eye_level_view' containerField ='viewpoints' translation='0 1.6332 0.0502' bboxCenter='0 0 0' bboxSize='-1 -1 -1'>
-
<!-- HAnimSite visualization shape -->
-
<TouchSensor description='HAnimSite eye_level_view'/>
-
<Shape USE='HAnimSiteShape'/>
-
<Viewpoint DEF='hanim_eye_level_viewpoint' description='eye level looking forward' orientation='0 1 0 3.141593' position='0 0 0'/>
-
<!-- HAnimSite/Viewpoint visualization shape -->
-
<Anchor description='HAnimSite hanim_eye_level_view Viewpoint ' url='"#hanim_eye_level_viewpoint"'>
<LOD forceTransitions='true' range='0.04'>
<WorldInfo info='"hide diamond when close"'/>
<Shape USE='HAnimSiteViewpointShape'/>
</LOD>
</Anchor>
</HAnimSite>
|
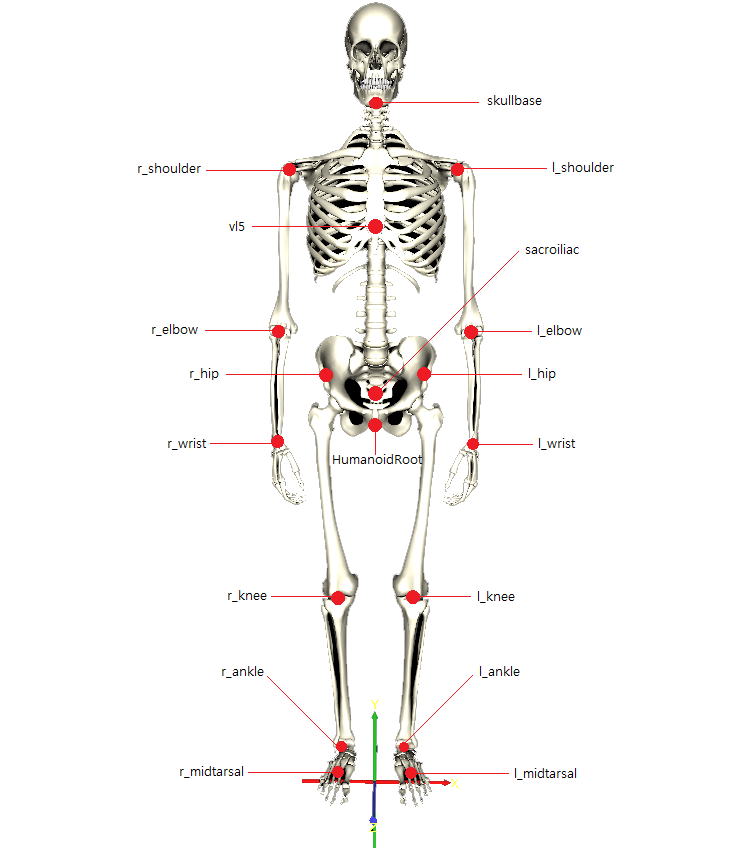{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}